MI VIF API
REVISION HISTORY¶
| Revision No. | Description |
Date |
|---|---|---|
| 3.0 | 12/04/2020 | |
| 3.1 | 07/16/2021 | |
| 3.2 | 08/25/2021 | |
| 3.3 | 12/22/2021 | |
| 3.4 | 02/17/2022 | |
| 3.5 | 03/21/2022 | |
| 3.6 | 07/08/2022 | |
| 3.7 | 10/27/2022 | |
| 3.8 | 01/11/2023 | |
| 3.9 | 03/14/2023 | |
| 3.10 | 04/17/2023 | |
| 3.11 | 06/28/2023 | |
| 3.12 | 12/22/2023 | |
| 3.13 | 02/19/2024 | |
| 3.14 | 04/24/2025 |
1. OVERVIEW¶
1.1. MODULE DESCRIPTION¶
MI_VIF is a device driver used for binding and enabling video input channels. It abstracts the differences in protocols and hardware among various video input devices, allowing upper-layer applications to operate without needing to consider specific sensor types. With simple configuration based on requirements, users can easily set up a pipeline for receiving video streams.s
KEYWORD:
-
sensor pad
sensor hardware interface location
-
VIF Group
The VIF IP's internal hardware architecture is responsible for processing video streams from the corresponding sensor pad
-
VIF Device
Channels within the VIF Group enable the transmission of video streams through different channels
-
Linear mode
Single VIF Device mode
-
HDR mode
To support HDR from the sensor, which contains both long and short exposure data, this configuration will occupy two or more VIF Devices.
-
realtime
VIF directly connects with downstream hardware
-
framemode
VIF data is first buffered in DRAM before being transferred to downstream modules
1.2. BASIC ARCHITECTURE¶
The MI_VIF module is primarily designed to receive video streams from front-end sensors. The VIF hardware contains multiple VIF groups, each maintaining a fixed correspondence with specific sensor pads (as shown in Figure 1-1).The VIF group's sensor interface types are hardware-configured, mandating specific pad/group assignments for particular standards (BT656/BT1120, etc.). Each group integrates multiple internal devices for concurrent multi-channel signal reception from the sensor.
The VIF module routes incoming data through configurable output ports to different destinations based on application scenarios. In Frame Mode, it supports transferring both Bayer and YUV422 format data to system memory. When bound to the ISP in real-time mode, it exclusively processes Bayer format data, while real-time binding with the SCL only permits YUV422 data transmission.

Figure 1-2 illustrates the application development approach using the MI_VIF API

Figure 1-2 MI_VIF Usage Methodology
1.3. FUNCTIONAL DESCRIPTION¶
MI_VIF supports the following features:
-
Receiving sensor output of different interface types
-
Controlling the output video frame rate
-
Cropping the output image
-
FBC (Frame Buffer Compression) compression of data
-
CRC (Cyclic Redundancy Check) verification of data
-
Outputting fixed-pattern images
1.4. APPLICATION SCENARIOS¶
MI_VIF currently supports the following deployment environments, all of which allow development using the MI_VIF API:
-
Pure Linux environment
-
Pure RTOS environment
-
Dual-OS environment
1.5. CHIPSET VARIATIONS¶
Current chip codename: PCUPID.
The MI_VIF API maintains consistent behavior across different chipsets,primary hardware variations between chipsets include: number of underlying VIF groups and devices, and supported sensor interface types
1.5.1. Tiramisu¶
Tiramisu hardware quantity and layout are shown in the figure below.

| Supported Interfaces | Associated Sensor Pad |
|---|---|
| BT656 | 0、2 |
| MIPI | 0、1、2、3 |
Tiramisu has two output ports with the following respective functions:
| PortId | Input Pixel Format | Output Pixel Format | Crop | scaling | Output Mode |
|---|---|---|---|---|---|
| 0 | Native sensor format | 1. Native sensor format2. YUV422→12-bit Bayer conversion | Not supported | Not supported | 1. DRAM output2. Realtime output to MI_ISP (Bayer only, single device at a time)3. Realtime output to MI_SCL (YUV422 only, single device at a time) |
| 1 | YUV422 only | 12-bit Bayer only | Supported | Downscaling only (max width=960 when height scaling applied) | DRAM output only |
1.5.2. Muffin¶
Muffin hardware quantity and layout are shown in the figure below.

| Supported Interfaces | Associated Sensor Pad |
|---|---|
| BT656 | 0、1、2、3、4、5、6、7 |
| BT1120 | 0、1、4、5 |
| MIPI | 0、1、2、3、4、5、6、7 |
| LVDS | 0、2、4、6 |
Muffin has one output port with the following function:
| PortId | Input Pixel Format | Output Pixel Format | Crop | scaling | Output Mode |
|---|---|---|---|---|---|
| 0 | Native sensor format | 1. Native sensor format 2. YUV422→12-bit Bayer conversion |
Not supported | Not supported | 1. DRAM output only 2. Device0-15 support realtime output to MI_ISP Dev0, only one can be used at a time;Device16-31 support realtime output to MI_ISP Dev1, only one can be used at a time 3. Device0-15 support YUV422 realtime output to MI_SCL Dev, only one can be used at a time. Device16-31 support YUV422 realtime output to MI_SCL Dev6, only one can be used at a time |
1.5.3. Mochi¶
Mochi hardware quantity and layout are shown in the figure below.

| Supported Interfaces | Associated Sensor Pad |
|---|---|
| BT656 | 0、1、2、3 |
| BT1120 | 0、1 |
Mochi has one output port with the following function:
| PortId | Input Pixel Format | Output Pixel Format | Crop | scaling | Output Mode |
|---|---|---|---|---|---|
| 0 | YUV422 only | YUV422 only | Not supported | Not supported | 1. Dram output 2. any device support yuv422 realtime output to MI_ISP Dev0, only one can be used at a time |
1.5.4. Maruko¶
Maruko hardware quantity and layout are shown in the figure below.

| Supported Interfaces | Associated Sensor Pad |
|---|---|
| BT656 | 1 |
| MIPI | 0、2 |
Maruko has one output port with the following function:
| PortId | Input Pixel Format | Output Pixel Format | Crop | scaling | Output Mode |
|---|---|---|---|---|---|
| 0 | Native sensor format | Native sensor format | Not supported | Not supported | 1. Dram output 2. any device support realtime output to MI_ISP Dev0, only one can be used at a time, any device support yuv422 realtime output to MI_SCL Dev2, only one can be used at a time |
1.5.5. Opera¶
Opera hardware quantity and layout are shown in the figure below.

| Supported Interfaces | Associated Sensor Pad |
|---|---|
| BT656 | 0、1 |
| BT1120 | 0 |
| MIPI | 0、1、2、3 |
Opera has one output port with the following function:
| PortId | Input Pixel Format | Output Pixel Format | Crop | scaling | Output Mode |
|---|---|---|---|---|---|
| 0 | Native sensor format | Native sensor format | Not supported | Not supported | 1. Dram output 2. any device support realtime output to MI_ISP Dev0, only one can be used at a time, any device support yuv422 realtime output to MI_SCL Dev2, only one can be used at a time |
1.5.6. Souffle¶
Souffle hardware quantity and layout are shown in the figure below.

| Supported Interfaces | Associated Sensor Pad |
|---|---|
| BT656 | 0、1 |
| BT1120 | 0 |
| MIPI | 0、1、2、3 |
Souffle has one output port with the following function:
| PortId | Input Pixel Format | Output Pixel Format | Crop | scaling | Output Mode |
|---|---|---|---|---|---|
| 0 | Native sensor format | Native sensor format | Not supported | Not supported | 1. Dram output 2. any device support realtime output to MI_ISP Dev0, only one can be used at a time, any device support yuv422 realtime output to MI_SCL Dev2, only one can be used at a time |
1.5.7. Iford¶
Iford hardware quantity and layout are shown in the figure below.

| Supported Interfaces | Associated Sensor Pad |
|---|---|
| MIPI | 0、2 |
Iford has one output port with the following function:
| PortId | Input Pixel Format | Output Pixel Format | Crop | scaling | Output Mode |
|---|---|---|---|---|---|
| 0 | Native sensor format | Native sensor format | supported | Not supported | 1. Dram output 2. any device support realtime output to MI_ISP Dev0, only one can be used at a time, any device support yuv422 realtime output to MI_SCL Dev2, only one can be used at a time |
1.5.8. pCupid¶
pCupid hardware quantity and layout are shown in the figure below.

| Supported Interfaces | Associated Sensor Pad |
|---|---|
| BT656 | 0 |
| parallel | 0 |
| MIPI | 0、2 |
pCupid has one output port with the following function:
| PortId | Input Pixel Format | Output Pixel Format | Crop | scaling | Output Mode |
|---|---|---|---|---|---|
| 0 | Native sensor format | Native sensor format | supported | Not supported | 1. Dram output 2. any device support realtime output to MI_ISP Dev0, only one can be used at a time |
1.6. WORKING PRINCIPLE¶
The VIF can be divided into frame mode and realtime bind based on its binding relationship with the downstream module. For these two modes, users can choose according to the memory and bandwidth requirements in their actual usage scenarios. Compared to realtime mode, frame mode has higher memory and bandwidth demands. Therefore, it is recommended to use VIF realtime mode under conditions of limited memory and bandwidth.
1.6.1 FRAMEMODE¶
When the VIF is bound to the downstream module in frame mode, each device's output port in the VIF first writes data to the corresponding location in DRAM. The downstream module (typically the ISP) then reads from the designated memory address.

vif-isp frame mode
1.6.2 REALTIME¶
The VIF also supports direct hardware-connected data transmission to downstream modules, implemented in two modes: VIF-ISP realtime binding and VIF-SCL realtime binding.
1.6.2.1 VIF-ISP REALTIME¶
In VIF-ISP realtime binding under linear mode (non-HDR mode), VIF data bypasses DRAM and is sent directly to the ISP for internal processing. However, in HDR mode, the long-exposure data path still goes through DRAM. This working mode only supports Bayer format image transmission.

vif-isp realtime mode
1.6.2.2 VIF-SCL REALTIME¶
In VIF-SCL realtime binding mode, the VIF bypasses the ISP module completely without performing any image signal processing, transmitting data directly to the SCL module. This operating mode only supports YUV format image transmission.

vif-scl realtime mode
1.7. DEVELOPMENT WORKFLOW¶
1.7.1 COMPILATION CONFIGURATION¶
-
enter alkaid project root directory, make menuconfig
-
press Enter to choose Sdk Config sub-options
-
press Enter to choose Interface Compile Config sub-options
-
Press the spacebar to select the VIF submodule and recompile the project.
Upon successful compilation, mi_vif.ko will be generated at sdk/interface/src/vif. Header file mi_vif.h and mi_vif_datatype.h will be release to project/release. In pure linux environment they are automatically packaged into system images by default. While in dualos environment, they are excluded from default image packaging (requires manual compilation and installation)
1.7.2 API CALL FLOW¶

MI_VIF API Calling Sequence
The MI_VIF interface invocation follows these steps:
-
Configure VIF Group parameters (interface type, operation mode, etc.) and create the specified VIF group
-
Set VIF Device parameters (window size, pixel format, etc.)
-
Enable the target VIF Device
-
Configure VIF OutputPort parameters (window size, pixel format, compression mode, etc.)
-
Enable the target VIF OutputPort
-
Disable the VIF OutputPort
-
Disable the VIF Device
-
Destroy the VIF Group
-
Terminate the application
1.8. SAMPLE CODE¶
This example demonstrates the development workflow based on the MI_VIF API.
#include <stdio.h> #include "mi_sys.h" #include "mi_vif.h" #include "mi_sensor.h" #include "mi_vif_datatype.h" #include <string.h> int main(int argc, char **argv) { MI_SNR_PADID eSnrPadId = 0; MI_VIF_GROUP GroupId = 0; MI_S32 s32Ret = 0; MI_VIF_DEV vifDev =0; MI_VIF_PORT vifPort = 0; MI_SYS_ChnPort_t stChnPort; MI_VIF_GroupAttr_t stGroupAttr; MI_VIF_DevAttr_t stVifDevAttr; MI_VIF_OutputPortAttr_t stVifPortInfo; memset(&stGroupAttr, 0x0, sizeof(MI_VIF_GroupAttr_t)); stGroupAttr.eIntfMode = E_MI_VIF_MODE_MIPI; memset(&stVifDevAttr, 0x0, sizeof(MI_VIF_DevAttr_t)); stVifDevAttr.stInputRect.u16X = 0; stVifDevAttr.stInputRect.u16Y = 0; stVifDevAttr.stInputRect.u16Width = 1920; stVifDevAttr.stInputRect.u16Height = 1080; stVifDevAttr.eInputPixel = (MI_SYS_PixelFormat_e)47; memset(&stVifPortInfo, 0, sizeof(MI_VIF_OutputPortAttr_t)); stVifPortInfo.stCapRect.u16X = 0; stVifPortInfo.stCapRect.u16Y = 0; stVifPortInfo.stCapRect.u16Width = 1920; stVifPortInfo.stCapRect.u16Height = 1080; stVifPortInfo.stDestSize.u16Width = 1920; stVifPortInfo.stDestSize.u16Height = 1080; stVifPortInfo.ePixFormat = (MI_SYS_PixelFormat_e)47; memset(&stChnPort, 0x0, sizeof(MI_SYS_ChnPort_t)); stChnPort.eModId=E_MI_MODULE_ID_VIF; stChnPort.u32DevId=vifDev; stChnPort.u32ChnId=0; stChnPort.u32PortId=vifPort; MI_SYS_Init(0); s32Ret = MI_SNR_Enable(eSnrPadId); if(s32Ret != MI_SUCCESS) { printf("enable sensor:%d failed\n", eSnrPadId); goto EXIT; } s32Ret = MI_VIF_CreateDevGroup(GroupId, &stGroupAttr); if(s32Ret != MI_SUCCESS) { printf("create group id:%d failed\n", GroupId); goto EXIT; } s32Ret = MI_VIF_SetDevAttr(vifDev, &stVifDevAttr); if(s32Ret != MI_SUCCESS) { printf("set vif dev:%d failed\n",vifDev); goto EXIT; } s32Ret = MI_VIF_EnableDev(vifDev); if(s32Ret != MI_SUCCESS) { printf("enable vif dev:%d failed\n",vifDev); goto EXIT; } s32Ret = MI_VIF_SetOutputPortAttr(vifDev, vifPort, &stVifPortInfo); if(s32Ret != MI_SUCCESS) { printf("set vif dev:%d port:%d failed\n",vifDev,vifPort); goto EXIT; } s32Ret = MI_VIF_EnableOutputPort(vifDev, vifPort); if(s32Ret != MI_SUCCESS) { printf("enable vif dev:%d port:%d failed\n",vifDev,vifPort); goto EXIT; } s32Ret = MI_SYS_SetChnOutputPortDepth(0, &stChnPort, 1, 4); if(s32Ret != MI_SUCCESS) { printf("set vif port depth failed\n"); goto EXIT; } s32Ret = MI_VIF_DisableOutputPort(vifDev, vifPort); if(s32Ret != MI_SUCCESS) { printf("disable vif dev:%d port:%d failed\n",vifDev,vifPort); goto EXIT; } s32Ret = MI_VIF_DisableDev(vifDev); if(s32Ret != MI_SUCCESS) { printf("disable vif dev:%d failed\n",vifDev); goto EXIT; } s32Ret = MI_VIF_DestroyDevGroup(GroupId); if(s32Ret != MI_SUCCESS) { printf("destroy vif group:%d failed\n",GroupId); goto EXIT; } s32Ret = MI_SNR_Disable(eSnrPadId); if(s32Ret != MI_SUCCESS) { printf("enable sensor:%d failed\n", eSnrPadId); goto EXIT; } MI_SYS_Exit(0); EXIT: return s32Ret; }
2. API REFERENCE¶
This function module provides the following API:
| API Name | Function |
|---|---|
| MI_VIF_CreateDevGroup | Create a Group corresponding to Device |
| MI_VIF_DestroyDevGroup | Destroy Group |
| MI_VIF_SetDevGroupAttr | Set Group attributes |
| MI_VIF_GetDevGroupAttr | Get Group attributes |
| MI_VIF_SetDevAttr | Set device attribute |
| MI_VIF_GetDevAttr | Get device attribute |
| MI_VIF_EnableDev | Enable device |
| MI_VIF_DisableDev | Disable device |
| MI_VIF_GetDevStatus | Get device status |
| MI_VIF_SetOutputPortAttr | Set output port attribute |
| MI_VIF_GetOutputPortAttr | Get output port attribute |
| MI_VIF_EnableOutputPort | Enable output port |
| MI_VIF_DisableOutputPort | Disable output port |
| MI_VIF_Query | Query VIF channel port interrupt counts, average frame rate, etc. |
| MI_VIF_CallBackTask_Register | Register callback interface with VIF |
| MI_VIF_CallBackTask_UnRegister | Unregister callback interface with VIF |
| MI_VIF_CustFunction | Provide Vif customer function |
2.1. MI_VIF_CreateDevGroup¶
-
Description
Create a Group corresponding to Device
-
Syntax
MI_S32 MI_VIF_CreateDevGroup(MI_VIF_GROUP GroupId, MI_VIF_GroupAttr_t *pstGroupAttr)
-
Parameters
Parameter Name Description Input/Output GroupId Group ID Input pstGroupAttr Group attributes, static attributes. Input -
Return Value
-
MI_SUCCESS(0): Successful
-
Non-zero: Failed, see error code for details
-
-
Dependence
-
Header: mi_vif_datatype.h, mi_vif.h
-
Library: libmi_vif.a
-
-
Note
-
When MI VIF and back-end module have both real-time and FrameMode connections, such as ISP Bayer Realitme, SCL Dev2 YUV Realitme, and other Devs have Frame mode connections, priority should be given to create DevGroup with real-time connection and bind back-end module.
-
Before Creating DevGroup, make sure that the sensor flows out successfully. That is, if you use our Mi sensor, you need to ensure MI_SNR_Enable. If you use your user sensor, you need to ensure that the user's own sensor has been initialized.
-
Group Id Device Id 0 Device0~3 1 Device4~7 2 Device8~11 3 Device12~15 4 Device16~19 5 Device20~23 6 Device24~27 7 Device28~31
-
-
Example
#define ST_MAX_VIF_DEV_PERGROUP (4) #define ST_MAX_VIF_OUTPORT_NUM (2)
MI_VIF initialization process:
MI_S32 ST_VifModuleInit(MI_VIF_GROUP groupId) { MI_VIF_DEV vifDev =0; MI_VIF_PORT vifPort = 0; MI_SNR_PADID SnrPadId = 0; MI_U32 u32PlaneId = 0; MI_U16 vifDevIdPerGroup=0; MI_SNR_PADInfo_t stPad0Info; MI_SNR_PlaneInfo_t stSnrPlane0Info; memset(&stPad0Info, 0x0, sizeof(MI_SNR_PADInfo_t)); memset(&stSnrPlane0Info, 0x0, sizeof(MI_SNR_PlaneInfo_t)); MI_VIF_GroupAttr_t stGroupAttr; memset(&stGroupAttr, 0x0, sizeof(MI_VIF_GroupAttr_t)); STCHECKRESULT(MI_SNR_GetPadInfo(SnrPadId, &stPad0Info)); STCHECKRESULT(MI_SNR_GetPlaneInfo(SnrPadId, u32PlaneId, &stSnrPlane0Info)); stGroupAttr.eIntfMode = E_MI_VIF_MODE_MIPI; stGroupAttr.eWorkMode = E_MI_VIF_WORK_MODE_1MULTIPLEX; stGroupAttr.eHDRType = E_MI_VIF_HDR_TYPE_OFF; if(stGroupAttr.eIntfMode == E_MI_VIF_MODE_BT656) stGroupAttr.eClkEdge = (MI_VIF_ClkEdge_e)stPad0Info.unIntfAttr.stBt656Attr.eClkEdge; else stGroupAttr.eClkEdge = E_MI_VIF_CLK_EDGE_DOUBLE; STCHECKRESULT(MI_VIF_CreateDevGroup(groupId, &stGroupAttr)); for(vifDevIdPerGroup=0; vifDevIdPerGroup< ST_MAX_VIF_DEV_PERGROUP; vifDevIdPerGroup++) { MI_VIF_DevAttr_t stVifDevAttr; memset(&stVifDevAttr, 0x0, sizeof(MI_VIF_DevAttr_t)); vifDev = groupId*ST_MAX_VIF_DEV_PERGROUP+vifDevIdPerGroup; stVifDevAttr.stInputRect.u16X = stSnrPlane0Info.stCapRect.u16X; stVifDevAttr.stInputRect.u16Y = stSnrPlane0Info.stCapRect.u16Y; stVifDevAttr.stInputRect.u16Width = stSnrPlane0Info.stCapRect.u16Width; stVifDevAttr.stInputRect.u16Height = stSnrPlane0Info.stCapRect.u16Height; if(stSnrPlane0Info.eBayerId = E_MI_SYS_PIXEL_BAYERID_MAX) { stVifDevAttr.eInputPixel = stSnrPlane0Info.ePixel; } else stVifDevAttr.eInputPixel = (MI_SYS_PixelFormat_e)RGB_BAYER_PIXEL(stSnrPlane0Info.ePixPrecision, stSnrPlane0Info.eBayerId); printf("setchnportattr (%d,%d,%d,%d) \n", stVifDevAttr.stInputRect.u16X, stVifDevAttr.stInputRect.u16Y, stVifDevAttr.stInputRect.u16Width, stVifDevAttr.stInputRect.u16Height); STCHECKRESULT(MI_VIF_SetDevAttr(vifDev, &stVifDevAttr)); STCHECKRESULT(MI_VIF_EnableDev(vifDev)); for(vifPort=0; vifPort< ST_MAX_VIF_OUTPORT_NUM; vifPort++) { MI_VIF_OutputPortAttr_t stVifPortInfo; memset(&stVifPortInfo, 0, sizeof(MI_VIF_OutputPortAttr_t)); stVifPortInfo.stCapRect.u16X = stSnrPlane0Info.stCapRect.u16X; stVifPortInfo.stCapRect.u16Y = stSnrPlane0Info.stCapRect.u16Y; stVifPortInfo.stCapRect.u16Width = stSnrPlane0Info.stCapRect.u16Width; stVifPortInfo.stCapRect.u16Height = stSnrPlane0Info.stCapRect.u16Height; stVifPortInfo.stDestSize.u16Width = stSnrPlane0Info.stCapRect.u16Width; stVifPortInfo.stDestSize.u16Height = stSnrPlane0Info.stCapRect.u16Height; printf("sensor bayerid %d, bit mode %d \n", stSnrPlane0Info.eBayerId, stSnrPlane0Info.ePixPrecision); if(stSnrPlane0Info.eBayerId = E_MI_SYS_PIXEL_BAYERID_MAX) { stVifPortInfo.ePixFormat = stSnrPlane0Info.ePixel; } else stVifPortInfo.ePixFormat = (MI_SYS_PixelFormat_e)RGB_BAYER_PIXEL(stSnrPlane0Info.ePixPrecision, stSnrPlane0Info.eBayerId); stVifPortInfo.eFrameRate = E_MI_VIF_FRAMERATE_FULL; STCHECKRESULT(MI_VIF_SetOutputPortAttr(vifDev, vifPort, &stVifPortInfo)); STCHECKRESULT(MI_VIF_EnableOutputPort(vifDev, vifPort)); } } return MI_SUCCESS; }MI_VIF deinitialization process:
MI_S32 ST_VifModuleUnInit(MI_VIF_GROUP groupId) { MI_VIF_DEV vifDev = 0; MI_VIF_PORT vifPort=0; MI_U16 vifDevIdPerGroup=0; for(vifDevIdPerGroup=0; vifDevIdPerGroup< ST_MAX_VIF_DEV_PERGROUP; vifDevIdPerGroup++) { vifDev = groupId*ST_MAX_VIF_DEV_PERGROUP+vifDevIdPerGroup; for(vifPort=0; vifPort< ST_MAX_VIF_OUTPORT_NUM; vifPort++) { STCHECKRESULT(MI_VIF_DisableOutputPort(vifDev, vifPort)); } STCHECKRESULT(MI_VIF_DisableDev(vifDev)); } STCHECKRESULT(MI_VIF_DestroyDevGroup(groupId)); return MI_SUCCESS; } -
Related APIs
2.2. MI_VIF_DestroyDevGroup¶
-
Description
Destroy the group corresponding to the device.
-
Syntax
MI_S32 MI_VIF_DestroyDevGroup(MI_VIF_GROUP GroupId)
-
Parameters
Parameter Name Description Input/Output GroupId Group ID Input -
Return Value
-
MI_SUCCESS(0): Successful
-
Non-zero: Failed, see error code for details
-
-
Dependence
-
Header: mi_vif_datatype.h, mi_vif.h
-
Library: libmi_vif.a
-
-
Note
At first, use MI_VIF_DisableOutputPort to disable all the output ports on device, the use MI_VIF_DisableDev to disable all the devices on group.
-
Example
See the example of MI_VIF_CreateDevGroup.
-
Related APIs
2.3. MI_VIF_SetDevGroupAttr¶
-
Description
Set Group attributes.
-
Syntax
MI_S32 MI_VIF_SetDevGroupAttr(MI_VIF_GROUP GroupId, MI_VIF_GroupAttr_t *pstGroupAttr)
-
Parameters
Parameter Name Description Input/Output GroupId Group ID Input pstGroupAttr Group attributes Output -
Return Value
-
MI_SUCCESS(0): Successful
-
Non-zero: Failed, see error code for details
-
-
Dependence
-
Header: mi_vif_datatype.h, mi_vif.h
-
Library: libmi_vif.a
-
-
Related APIs
2.4. MI_VIF_GetDevGroupAttr¶
-
Description
Get Group attributes.
-
Syntax
MI_S32 MI_VIF_GetDevGroupAttr(MI_VIF_GROUP GroupId, MI_VIF_GroupAttr_t *pstGroupAttr)
-
Parameters
Parameter Name Description Input/Output GroupId Group ID Input pstGroupAttr Group attributes Output -
Return Value
-
MI_SUCCESS(0): Successful
-
Non-zero: Failed, see error code for details
-
-
Dependence
-
Header: mi_vif_datatype.h, mi_vif.h
-
Library: libmi_vif.a
-
-
Related APIs
2.5. MI_VIF_SetDevAttr¶
-
Description
Set VIF device attributes.
-
Syntax
MI_S32 MI_VIF_SetDevAttr(MI_VIF_DEV DevId, MI_VIF_DevAttr_t *pstDevAttr)
-
Parameters
Parameter Name Description Input/Output DevId VIF device ID Input pstDevAttr VIF device attribute pointer, static attribute. Input -
Return Value
-
MI_SUCCESS(0): Successful
-
Non-zero: Failed, see error code for details
-
-
Dependence
-
Header: mi_vif_datatype.h, mi_vif.h
-
Library: libmi_vif.a
-
-
Note
-
Make sure that the VIF device is disabled before calling. If the VIF device is enabled, you can use MI_VIF_DisableDev to disable it.
-
pstDevAttr is mainly used to configure the video input format of the specified VIF device.
-
eInputPixel only supports YUV422_YUYV/YVYU/UYVY/VYUY and bayer formats, please refer to chapter 1.2 for details, and set according to chip specifications.
-
-
Example
See the example of MI_VIF_CreateDevGroup.
-
Related APIs
2.6. MI_VIF_GetDevAttr¶
-
Description
Get VIF device attribute.
-
Syntax
MI_S32 MI_VIF_GetDevAttr(MI_VIF_DEV DevId, MI_VIF_DevAttr_t *pstDevAttr)
-
Parameters
Parameter Name Description Input/Output DevId VIF device ID Input pstDevAttr VIF device attribute pointer. Output -
Return Value
-
MI_SUCCESS(0): Successful
-
Non-zero: Failed, see error code for details
-
-
Dependence
-
Header: mi_vif_datatype.h, mi_vif.h
-
Library: libmi_vif.a
-
-
Related APIs
2.7. MI_VIF_EnableDev¶
-
Description
Enable VIF device.
-
Syntax
MI_S32 MI_VIF_EnableDev(MI_VIF_DEV DevId);
-
Parameters
Parameter Name Description Input/Output DevId VIF device ID Input -
Return Value
-
MI_SUCCESS(0): Successful
-
Non-zero: Failed, see error code for details
-
-
Dependence
-
Header: mi_vif_datatype.h, mi_vif.h
-
Library: libmi_vif.a
-
-
Note
-
Enable must be after device attribute have be configured, or fail will be returned
-
Calling again is available, fail will not be returned.
-
-
Example
Please refer to MI_VIF_SetDevAttr.
-
Related APIs
2.8. MI_VIF_DisableDev¶
-
Description
Disable VIF device.
-
Syntax
MI_S32 MI_VIF_DisableDev(MI_VIF_DEV DevId);
-
Parameters
Parameter Name Description Input/Output DevId VIF device ID Input -
Return Value
-
MI_SUCCESS(0): Successful
-
Non-zero: Failed, see error code for details
-
-
Dependence
-
Header: mi_vif_datatype.h, mi_vif.h
-
Library: libmi_vif.a
-
-
Note
-
Disable all the output ports on device before disable the VIF device.
-
Calling again is available, fail will not be returned.
-
-
Example
See the example of MI_VIF_CreateDevGroup
-
Related APIs
2.9. MI_VIF_GetDevStatus¶
-
Description
Get device status.
-
Syntax
MI_S32 MI_VIF_GetDevStatus(MI_VIF_DEV DevId, MI_VIF_DevStatus_t *pstVifDevStatus)
-
Parameters
Parameter Description Input/Output DevId VIF device ID Input pstVifDevStatus Device status Output -
Return Value
-
MI_SUCCESS(0): Successful
-
Non-zero: Failed, see error code for details
-
-
Dependence
-
Header: mi_vif_datatype.h, mi_vif.h
-
Library: libmi_vif.a
-
2.10. MI_VIF_SetOutputPortAttr¶
-
Description
Set VIF channel Output port attributes.·
-
Syntax
MI_S32 MI_VIF_SetOutputPortAttr(MI_VIF_DEV DevId, MI_VIF_PORT PortId, MI_VIF_OutputPortAttr_t *pstAttr);
-
Parameters
Parameter Name Description Input/Output DevId VIF device ID Input PortId Port ID Input pstAttr VIF device port attribute pointer Input -
Return Value
-
MI_SUCCESS(0): Successful
-
Non-zero: Failed, see error code for details
-
-
Dependence
-
Header: mi_vif_datatype.h, mi_vif.h
-
Library: libmi_vif.a
-
-
Note
-
MI_VIF_SetOutputPortAttr is used for setting port attribute in default, such as CapSize, DestSize, FrameRate, ect.
-
Port 0 does not support crop and scaling, so cap and dest size must be equal to input size in MI_VIF_SetDevAttr.
-
The input of port1 only supports YUV format, so only YUVsensor can use port1, which supports crop and scaling down, and the output only supports 12bit bayer format.
-
When Port1 height is scaling down, the maximum output width is 960.
-
Tiramisu/Muffin/Mochi/Opera series chips: eFrameRate setting is not supported.
-
Tiramisu/Muffin/Opera/Souffle series chips: port0 supports output 12-bit Bayer format, which can be sent to MI_ISP for 3DNR.
-
Mochi series chip: supports output YUV422 format, which can be sent to MI_ISP for 3DNR.
Chip Compress support pixel Support compress mode Note Tiramisu Bayer 10/12bit E_MI_SYS_COMPRESS_MODE_TO_8BIT None Muffin Bayer 10/12bit E_MI_SYS_COMPRESS_MODE_TO_8BIT None Mochi YUV422 UYVY E_MI_SYS_COMPRESS_MODE_TO_6BIT
E_MI_SYS_COMPRESS_MODE_SFBC0DI mode does not support SFBC0 compress mode. Maruko Bayer 10/12bit E_MI_SYS_COMPRESS_MODE_TO_8BIT None Opera Bayer 10/12bit E_MI_SYS_COMPRESS_MODE_TO_8BIT None Souffle Bayer 10/12bit E_MI_SYS_COMPRESS_MODE_TO_8BIT None Iford Bayer 10/12bit E_MI_SYS_COMPRESS_MODE_TO_8BIT None
-
-
Example
See the example of MI_VIF_CreateDevGroup.
-
Related APIs
2.11. MI_VIF_GetOutputPortAttr¶
-
Description
Get VIF channel Output port attributes.
-
Syntax
MI_S32 MI_VIF_GetOutputPortAttr(MI_VIF_DEV DevId, MI_VIF_PORT PortId, MI_VIF_OutputPortAttr_t *pstAttr)
-
Parameters
Parameter Name Description Input/Output DevId VIF device ID Input PortId Port ID Input pstAttr VIF device port attribute pointer Output -
Return Value
-
MI_SUCCESS(0): Successful
-
Non-zero: Failed, see error code for details
-
-
Dependence
-
Header: mi_vif_datatype.h, mi_vif.h
-
Library: libmi_vif.a
-
-
Related APIs
2.12. MI_VIF_EnableOutputPort¶
-
Description
Enable VIF Output port.
-
Syntax
MI_S32 MI_VIF_EnableOutputPort(MI_VIF_DEV DevId, MI_VIF_PORT PortId)
-
Parameters
Parameter Name Description Input/Output DevId VIF device ID Input PortId Port ID Input -
Return Value
-
MI_SUCCESS(0): Successful
-
Non-zero: Failed, see error code for details
-
-
Dependence
-
Header: mi_vif_datatype.h, mi_vif.h
-
Library: libmi_vif.a
-
-
Note
-
The channel attributes must be set first, and the VIF device bound channel must be enabled.
-
The VIF channel can be enabled repeatedly without returning failure.
-
-
Example
See the example of MI_VIF_SetDevAttr.
-
Related APIs
2.13. MI_VIF_DisableOutputPort¶
-
Description
Disable VIF Output port.
-
Syntax
MI_S32 MI_VIF_DisableOutputPort(MI_VIF_DEV DevId, MI_VIF_PORT PortId)
-
Parameters
Parameter Name Description Input/Output DevId VIF device ID Input PortId Port ID Input -
Return Value
-
MI_SUCCESS(0): Successful
-
Non-zero: Failed, see error code for details
-
-
Dependence
-
Header: mi_vif_datatype.h, mi_vif.h
-
Library: libmi_vif.a
-
-
Note
-
The VIF channel port stops collecting video input data after being disabled. And if the backend has been bound, the backend will no longer receive video images.
-
The VIF channel can be disabled repeatedly without returning failure.
-
-
Example
See the example of MI_VIF_CreateDevGroup.
-
Related APIs
2.14. MI_VIF_Query¶
-
Description
Query VIF channel port interrupt counts, average frame rate, etc.
-
Syntax
MI_S32 MI_VIF_Query(MI_VIF_DEV DevId, MI_VIF_PORT PortId, MI_VIF_DevPortStat_t *pstStat)
-
Parameters
Parameter Name Description Input/Output DevId VIF device ID Input PortId Port ID Input pstStat Channel information structure pointer. Output -
Return Value
-
MI_SUCCESS(0): Successful
-
Non-zero: Failed, see error code for details
-
-
Dependence
-
Header: mi_vif_datatype.h, mi_vif.h
-
Library: libmi_vif.a
-
-
Note
-
This API can be used to query interrupt counts, channel enable/disable status, interrupt loss counts, VB fail counts, height/width of image
-
Frame rate got via this API is average frame rate over 1 second, VIF could calculate average frame rate every second, the precision of this value is not exact
-
User could query interrupt loss counts via this API. If this loss counts increase at all time, it meant VIF is abnormal.
-
This interface is only supported by chips after Tiramisu.
-
2.15. MI_VIF_CallBackTask_Register¶
-
Description
Register callback interface with VIF
-
Syntax
MI_S32 MI_VIF_CallBackTask_Register(MI_VIF_DEV DevId, MI_VIF_CallBackParam_t *pstCallBackParam);
-
Parameters
Parameter Name Description Input/Output DevId VIF device ID Input pstCallBackParam Arguments Input -
Return Value
-
MI_SUCCESS(0): Successful
-
Non-zero: Failed, see error code for details
-
-
Dependence
-
Header: mi_vif_datatype.h, mi_vif.h
-
Library: libmi_vif.a
-
-
Note
-
Currently, this interface only supports kernel mode calls
-
This interface must be called in pair with MI_VIF_CallBackTask_UnRegister
-
-
Example
MI_S32 _mi_vif_framestart1(MI_U64 u64Data) { DBG_ERR("DATA %llu \n", u64Data); return 0; } MI_S32 _mi_vif_framestart2(MI_U64 u64Data) { DBG_ERR("DATA %llu \n", u64Data); return 0; } static MS_S32 _mi_vif_testRegVifCallback(void) { MI_VIF_CallBackParam_t stCallBackParam1; MI_VIF_CallBackParam_t stCallBackParam2; MI_VIF_DEV u32DevId = 0; memset(&stCallBackParam1, 0x0, sizeof(MI_VIF_CallBackParam_t)); memset(&stCallBackParam2, 0x0, sizeof(MI_VIF_CallBackParam_t)); stCallBackParam1.eCallBackMode = E_MI_VIF_CALLBACK_ISR; stCallBackParam1.eIrqType = E_MI_VIF_IRQ_FRAMESTART; stCallBackParam1.pfnCallBackFunc = _mi_vif_framestart1; stCallBackParam1.u64Data = 11; MI_VIF_CallBackTask_Register(u32DevId,&stCallBackParam1); stCallBackParam2.eCallBackMode = E_MI_VIF_CALLBACK_ISR; stCallBackParam2.eIrqType = E_MI_VIF_IRQ_FRAMESTART; stCallBackParam2.pfnCallBackFunc = _mi_vif_framestart2; stCallBackParam2.u64Data = 22; MI_VIF_CallBackTask_Register(u32DevId,&stCallBackParam2); return 0; } static MS_S32 _mi_vif_testUnRegVifCallback(void) { MI_VIF_CallBackParam_t stCallBackParam1; MI_VIF_CallBackParam_t stCallBackParam2; MI_VIF_DEV u32DevId = 0; memset(&stCallBackParam1, 0x0, sizeof(MI_VIF_CallBackParam_t)); memset(&stCallBackParam1, 0x0, sizeof(MI_VIF_CallBackParam_t)); stCallBackParam1.eCallBackMode = E_MI_VIF_CALLBACK_ISR; stCallBackParam1.eIrqType = E_MI_VIF_IRQ_FRAMESTART; stCallBackParam1.pfnCallBackFunc = _mi_vif_framestart1; stCallBackParam1.u64Data = 33; MI_VIF_CallBackTask_UnRegister(u32DevId,&stCallBackParam1); stCallBackParam2.eCallBackMode = E_MI_VIF_CALLBACK_ISR; stCallBackParam2.eIrqType = E_MI_VIF_IRQ_FRAMESTART; stCallBackParam2.pfnCallBackFunc = _mi_vif_framestart2; stCallBackParam2.u64Data = 44; MI_VIF_CallBackTask_UnRegister(u32DevId,&stCallBackParam2); return 0; } -
Related topic
2.16. MI_VIF_CallBackTask_UnRegister¶
-
Description
Unregister callback interface with VIF
-
Syntax
MI_S32 MI_VIF_CallBackTask_UnRegister(MI_VIF_DEV DevId, MI_VIF_CallBackParam_t *pstCallBackParam);
-
Parameters
Parameter Name Description Input/Output DevId VIF device ID Input pstCallBackParam Arguments Input -
Return Value
-
MI_SUCCESS(0): Successful
-
Non-zero: Failed, see error code for details
-
-
Dependence
-
Header: mi_vif_datatype.h, mi_vif.h
-
Library: libmi_vif.a
-
-
Note
-
Currently, this interface only supports kernel mode calls
-
This interface must be called in pair with MI_VIF_CallBackTask_Register
-
Example
Refer to MI_VIF_CallBackTask_Register example.
-
Related topic
2.17. MI_VIF_CustFunction¶
-
Description
Provide Vif customer function.
-
Syntax
MI_S32 MI_VIF_CustFunction(MI_VIF_DEV DevId, MI_VIF_CustCmd_e eCmdId, MI_U32 u32DataSize, void *pCustData);
-
Parameters
Parameter Name Description Input/Output DevId VIF device ID Input eCmdId Customer Command ID Input u32DataSize Customer Data Size Input pCustData Customer Data Address Input -
Return Value
-
MI_SUCCESS(0): Successful
-
Non-zero: Failed, see error code for details
-
-
Dependence
-
Header: mi_vif_datatype.h, mi_vif.h
-
Library: libmi_vif.a
-
3. VIF DATA TYPE¶
VIF module relative data type definition:
| Data type | description |
|---|---|
| MI_VIF_GROUP | Define device group ID |
| MI_VIF_IntfMode_e | Define interface mode of video Input device |
| MI_VIF_WorkMode_e | Define working mode of video Input device |
| MI_VIF_FrameRate_e | Define relation between Output fps and Input fps |
| MI_VIF_ClkEdge_e | Define clock edge received from video Input device |
| MI_VIF_HDRType_e | Define HDR type of video Input device |
| MI_VIF_MclkSource_e | Set Senor clock drive |
| MI_VIF_GroupIdMask_e | Device group mask |
| MI_VIF_SNRPad_e | Define SensorPad Id |
| MI_VIF_GroupAttr_t | Define Group attributes |
| MI_VIF_DevAttr_t | Define attribute of video Input device. |
| MI_VIF_OutputPortAttr_t | Define VIF output port attributes |
| MI_VIF_DevPortStat_t | Define VIF output port information structure |
| MI_VIF_DevStatus_t | Define VIF device current status |
| MI_VIF_CALLBK_FUNC | Define callback function type |
| MI_VIF_CallBackMode_e | Define callback mode |
| MI_VIF_IrqType_e | Define hardware interrupt type |
| MI_VIF_CallBackParam_t | Define callback parameters |
| MI_VIF_HDRFusionType_e | Define HDR fusion type |
| MI_VIF_HDRExposureType_e | Define HDR exposure type |
| MI_VIF_MetaDataType_e | Define VIF extra function type |
| MI_VIF_MetaDataAttr_t | Define VIF extra function structure |
| MI_VIF_CustCmd_e | Define VIF customer command id |
| MI_VIF_PutDataAttr_t | Define VIF input data structure |
3.1. MI_VIF_GROUP¶
-
Description
Define device group ID.
-
Definition
typedef MI_U32 MI_VIF_GROUP;
-
Related Type
3.2. MI_VIF_IntfMode_e¶
-
Description
Define interface mode of video Input device
-
Definition
typedef enum { E_MI_VIF_MODE_BT656 = 0, E_MI_VIF_MODE_DIGITAL_CAMERA, E_MI_VIF_MODE_BT1120_STANDARD, E_MI_VIF_MODE_BT1120_INTERLEAVED, E_MI_VIF_MODE_MIPI, E_MI_VIF_MODE_LVDS, E_MI_VIF_MODE_NUM } MI_VIF_IntfMode_e; -
Member
Member name Description E_MI_VIF_MODE_BT656 Input data protocol is standard BT.656, port data Input mode is compound mode of brightness and color, quantity mode is single E_MI_VIF_MODE_DIGITAL_CAMERA Input data protocol is Digital camera 6, port data Input mode is compound mode of brightness and color, quantity mode is single E_MI_VIF_MODE_BT1120_STANDARD Input data protocol is standard BT.1120(BT.656+ double quantity), port data Input mode is division mode of brightness and color, quantity mode is double E_MI_VIF_MODE_BT1120_INTERLEAVED Input data protocol is BT.1120 interleave mode, port data Input mode is division mode of brightness and color, quantity mode is double E_MI_VIF_MODE_MIPI Input data protocol is MIPI E_MI_VIF_MODE_LVDS Input data protocol is LVDS -
Note
The current interface mode can be obtained from eintfmode in MI_SNR_GetPadInfo.
-
Related Type
3.3. MI_VIF_WorkMode_e¶
-
Description
Define working mode of video Input device
-
Definition
typedef enum { /* BT656 multiple ch mode */ E_MI_VIF_WORK_MODE_1MULTIPLEX, E_MI_VIF_WORK_MODE_2MULTIPLEX, E_MI_VIF_WORK_MODE_4MULTIPLEX, E_MI_VIF_WORK_MODE_MAX } MI_VIF_WorkMode_e; -
member
Member name Description E_MI_VIF_WORK_MODE_1MULTIPLEX 1 way compound working mode. E_MI_VIF_WORK_MODE_2MULTIPLEX 2 way compound working mode. E_MI_VIF_WORK_MODE_4MULTIPLEX 4 way compound working mode. -
Note
For example, E_MI_VIF_WORK_MODE_4MULTIPLEX means that there are 4 mixed video signals in the Sensor Pad corresponding to the Group, if the number of mixed signals in the SensorPad does not match the compound working mode of the Group, it will cause abnormal signals collected by the Group.
-
Related Type
3.4. MI_VIF_FrameRate_e¶
-
Description
Define relation between Output fps and Input fps.
-
Definition
typedef enum { E_MI_VIF_FRAMERATE_FULL = 0, E_MI_VIF_FRAMERATE_HALF, E_MI_VIF_FRAMERATE_QUARTR, E_MI_VIF_FRAMERATE_OCTANT, E_MI_VIF_FRAMERATE_THREE_QUARTERS, E_MI_VIF_FRAMERATE_NUM, } MI_VIF_FrameRate_e; -
member
Member name Description E_MI_VIF_FRAMERATE_FULL Source over target is 1:1 Output. E_MI_VIF_FRAMERATE_HALF Source over target is 2:1 Output. E_MI_VIF_FRAMERATE_QUARTER Source over target is 4:1 Output. E_MI_VIF_FRAMERATE_OCTANT Source over target is 8:1 Output. E_MI_VIF_FRAMERATE_THREE_QUARTERS Source over target is 4:3 Output. -
Note
This function is reserved. Control frame rate output can be set by MI_SYS_BindChnPort2.
-
Related Type
3.5. MI_VIF_ClkEdge_e¶
-
Description
Define clock edge received from video Input device
-
Definition
typedef enum { E_MI_VIF_CLK_EDGE_SINGLE_UP = 0, E_MI_VIF_CLK_EDGE_SINGLE_DOWN, E_MI_VIF_CLK_EDGE_DOUBLE, E_MI_VIF_CLK_EDGE_NUM } MI_VIF_ClkEdge_e; -
member
Member name Description E_MI_VIF_CLK_EDGE_SINGLE_UP Clock single edge mode, sampling in up edge E_MI_VIF_CLK_EDGE_SINGLE_DOWN lock single edge mode, sampling in down edge E_MI_VIF_CLK_EDGE_DOUBLE VIF do sampling in double edge for double edge data -
Related Type
3.6. MI_VIF_HDRType_e¶
-
Description
Define HDR type of video Input device
-
Definition
typedef enum { E_MI_VIF_HDR_TYPE_OFF, E_MI_VIF_HDR_TYPE_VC, //virtual channel mode HDR,vc0-long, vc1-short E_MI_VIF_HDR_TYPE_DOL, E_MI_VIF_HDR_TYPE_COMP, //compressed HDR mode E_MI_VIF_HDR_TYPE_LI, //Line interlace HDR E_MI_VIF_HDR_TYPE_COMPVS, E_MI_VIF_HDR_TYPE_DCG, //Dual conversion gain HDR E_MI_VIF_HDR_TYPE_MAX } MI_VIF_HDRType_e; -
member
Member name Description E_MI_VIF_HDR_TYPE_OFF HDR off E_MI_VIF_HDR_TYPE_VC virtual channel mode HDR,vc0-long, vc1-short E_MI_VIF_HDR_TYPE_DOL Digital Overlap High Dynamic Range E_MI_VIF_HDR_TYPE_COMP Long and Short exposure are merged by sesnor, and isp controls the gain vaule of two frames E_MI_VIF_HDR_TYPE_LI Line interlace HDR E_MI_VIF_HDR_TYPE_COMPVS compressed HDR + Very short E_MI_VIF_HDR_TYPE_DCG Dual conversion gain HDR -
Note
-
HDR type is related to the sensor. You can obtain the HDR type supported by the current sensor through ehdrmode of MI_SNR_GetPadInfo.
-
The realization of HDR function requires MI_VIF and MI_VPE modules to set the same HDR type.
-
DCG HDR type and COMPVS HDR type are temporarily not supported.
-
Opera series chip support COMP HDR type.
-
-
Related Type
3.7. MI_VIF_MclkSource_e¶
-
Description
Set Senor clock drive.
-
Definition
typedef enum { E_MI_VIF_MCLK_12MHZ, E_MI_VIF_MCLK_18MHZ, E_MI_VIF_MCLK_27MHZ, E_MI_VIF_MCLK_36MHZ, E_MI_VIF_MCLK_54MHZ, E_MI_VIF_MCLK_108MHZ, E_MI_VIF_MCLK_MAX }MI_VIF_MclkSource_e; -
Member
Member name Description E_MI_VIF_MCLK_12MHZ 12M clk type E_MI_VIF_MCLK_18MHZ 18M clk type E_MI_VIF_MCLK_27MHZ 27M clk type E_MI_VIF_MCLK_36MHZ 36M clk type E_MI_VIF_MCLK_54MHZ 54M clk type E_MI_VIF_MCLK_108MHZ 108M clk type -
Note
-
Set mclk from the sensor driver first.
-
If there is no sensor driver and the main control chip is needed to output mclk, then this parameter can be used.
-
-
Related Type
3.8. MI_VIF_GroupIdMask_e¶
-
Description
Device group mask.
-
Definition
typedef enum { E_MI_VIF_GROUPMASK_ID0 = 0x0001, E_MI_VIF_GROUPMASK_ID1 = 0x0002, E_MI_VIF_GROUPMASK_ID2 = 0x0004, E_MI_VIF_GROUPMASK_ID3 = 0x0008, E_MI_VIF_GROUPMASK_ID4 = 0x0010, E_MI_VIF_GROUPMASK_ID5 = 0x0020, E_MI_VIF_GROUPMASK_ID6 = 0x0040, E_MI_VIF_GROUPMASK_ID7 = 0x0080, E_MI_VIF_GROUPMASK_ID_MAX = 0xffff } MI_VIF_GroupIdMask_e; -
Note
In a multi-sensor splicing scene, two sensor images need to be output simultaneously, so you need to create a group, and put the two group id masks together to achieve this.
-
Related Type
3.9. MI_VIF_SNRPad_e¶
-
Description
Define SensorPad Id.
-
Definition
typedef enum { E_MI_VIF_SNRPAD_ID_0 = 0, E_MI_VIF_SNRPAD_ID_1 = 1, E_MI_VIF_SNRPAD_ID_2 = 2, E_MI_VIF_SNRPAD_ID_3 = 3, E_MI_VIF_SNRPAD_ID_4 = 4, E_MI_VIF_SNRPAD_ID_5 = 5, E_MI_VIF_SNRPAD_ID_6 = 6, E_MI_VIF_SNRPAD_ID_7 = 7, E_MI_VIF_SNRPAD_ID_MAX, E_MI_VIF_SNRPAD_ID_NA = 0xFF, }MI_VIF_SNRPad_e; -
Member
Member name Description E_MI_VIF_SNRPAD_ID_0 Corresponding hardware device Sensor0 E_MI_VIF_SNRPAD_ID_1 Corresponding hardware device Sensor1 E_MI_VIF_SNRPAD_ID_2 Corresponding hardware device Sensor2 E_MI_VIF_SNRPAD_ID_3 Corresponding hardware device Sensor3 E_MI_VIF_SNRPAD_ID_4 Corresponding hardware device Sensor4 E_MI_VIF_SNRPAD_ID_5 Corresponding hardware device Sensor5 E_MI_VIF_SNRPAD_ID_6 Corresponding hardware device Sensor6 E_MI_VIF_SNRPAD_ID_7 Corresponding hardware device Sensor7 E_MI_VIF_SNRPAD_ID_MAX Exceed the maximum Sensor Num E_MI_VIF_SNRPAD_ID_NA Invalid sensor id -
Note
-
In default, VIF Group0 corresponding to Sensor0, Group2 corresponding to Sensor1, Group6 corresponding to Sensor5.
-
Tiramisu/ Mochi has 4 pad(0-3), Muffin has 8 pad(0-7). See section 1.2 for details.
-
-
Related Type
3.10. MI_VIF_GroupAttr_t¶
-
Description
Define Group attributes.
-
Definition
typedef struct MI_VIF_GroupAttr_s { MI_VIF_IntfMode_e eIntfMode; MI_VIF_WorkMode_e eWorkMode; MI_VIF_HDRType_e eHDRType; MI_VIF_HDRFusionType_e eHDRFusionTpye; MI_U8 u8HDRExposureMask; MI_VIF_ClkEdge_e eClkEdge; //BT656 MI_VIF_MclkSource_e eMclk; MI_SYS_FrameScanMode_e eScanMode; MI_U32 u32GroupStitchMask; //multi vif dev bitmask by MI_VIF_GroupIdMask_e MI_VIF_MetaDataAttr_t stMetaDataAttr; } MI_VIF_GroupAttr_t; -
Member
Member name Description eIntfMode Interface mode eWorkMode Working mode eHDRType HDR type eHDRFusionTpye HDR fusion type u8HDRExposureMask HDR exposure type bitmask, composed of MI_VIF_HDRExposureType_e bitmask. eClkEdge Clock edge mode (rising edge sampling, falling edge sampling, double edge sampling). eMclk Type of clock output to sensor eScanMode Frame scan mode (sequential, interlace Scanning) u32GroupStitchMask Multiple GroupId stitched output, composed of MI_VIF_GroupIdMask_e bitmask. stMetaDataAttr Extra function switch and attributes (include PDAF/Header not compress/STA). -
Note
Tiramisu、Muffin: eScanMode only support E_MI_SYS_FRAME_SCAN_MODE_PROGRESSIVE.
u8HDRExposureMask : useless in 2Frame HDR, MI vif will set to LS(long/short) exposure inside. In 3Frame HDR, mask have 4 combinations, likes LMS(long/medium/short)/LM/LS/MS, only supported in Souffle.
-
Related Type
3.11. MI_VIF_DevAttr_t¶
-
Description
Define attribute of video Input device.
-
Definition
typedef struct MI_VIF_DevAttr_s { MI_SYS_PixelFormat_e eInputPixel; MI_SYS_DataPrecision_e eDataPrecision; MI_SYS_WindowRect_t stInputRect; MI_SYS_FieldType_e eField; MI_BOOL bEnH2T1PMode; } MI_VIF_DevAttr_t; -
member
Member name Description eInputPixel Input pixel format eDataPrecision Input pixel bit width stInputRect Collect the input range eField Frame field selection is only used in interlaced mode. It is recommended to select the bottom field when capturing a single field. In sequential mode, it must be set to E_MI_SYS_FIELDTYPE_NONE.
Value: 0 No Field / 1 Top Field / 2 Bottom Field / 3 Both FieldsbEnH2T1PMode Enable the function of reducing the collection by half in the horizontal direction. -
Note
-
In bayer format, the pixel format setting is as following:
stVifDevAttr.eInputPixel =(MI_SYS_PixelFormat_e)RGB_BAYER_PIXEL(stSnrPlane0Info.ePixPrecision, stSnrPlane0Info.eBayerId);
-
The eDataPrecision param is only used when DVP interface runs YUV sensor. For example, when inputting 8 bit YUV, please set eDataPrecision to E_MI_SYS_DATA_PRECISION_8BPP, which will notify VIF that the number of data pins is 8.
-
When the input format is YUV, the bEnH2T1Pmode can be used, otherwise return an error.
-
-
Related Type
3.12. MI_VIF_OutputPortAttr_t¶
-
Description
Define VIF output port attributes.
-
Definition
typedef struct MI_VIF_OutputPortAttr_s { MI_SYS_WindowRect_t stCapRect; MI_SYS_WindowSize_t stDestSize; MI_SYS_PixelFormat_e ePixFormat; MI_VIF_FrameRate_e eFrameRate; MI_SYS_CompressMode_e eCompressMode; } MI_VIF_OutputPortAttr_t; -
member
sub ports only support stDestSize, enDstFrameRate, other attributes will be ignored.
Member name Description stCapRect coordinates and width and height of capturing region(based on original device image). stDestSize Destination image size. Must to be configured, the size cannot over outside ADC Input image, or VIF hardware may be abnormal. ePixFormat Pixel storage format support, can support YUV422 packet/bayer. eFrameRate The ratio between the target frame rate and the input frame rate. If frame rate control is not performed, this value is set to 0. It can output in proportions of 1:1, 2:1, 4:1, 8:1, 4:3, etc. This function is reserved. Control frame rate output can be set by MI_SYS_BindChnPort2. eCompressMode Picture compression mode, only use when vif bind isp by framemode, for saving buffer. Default 0, no compression.
Muffin can use E_MI_SYS_COMPRESS_MODE_TO_8BIT, for FBC.
Mochi can use E_MI_SYS_COMPRESS_MODE_TO_6BIT (for YUV FBC) or E_MI_SYS_COMPRESS_MODE_SFBC0 (SFBC). -
Related Type
3.13. MI_VIF_DevPortStat_t¶
-
Description
Define VIF channel information structure.
-
Definition
typedef struct MI_VIF_DevPortStat_s { MI_BOOL bEnable; MI_U32 u32IntCnt; MI_U32 u32FrameRate; MI_U32 u32LostInt; MI_U32 u32VbFail; MI_U32 u32PicWidth; MI_U32 u32PicHeight; } MI_VIF_DevPortStat_t; -
member
Member name Description bEnable Channel enable. u32IntCnt Interrupt count. u32FrameRate Average fps every 1s, the precision is not perfect. u32LostInt Interrupt loss count. u32VbFail VB fail count. u32PicWidth Picture width. u32PicHeight Picture height. -
Note
-
Interrupt count can be used to detect no interrupt
-
Fps is average fps every 1s, VIF calculate average fps every 1s, the precision is not perfect.
-
If interrupt loss count increased all the time, it meant VIF is abnormal
-
-
Related Type
3.14. MI_VIF_DevStatus_t¶
-
Description
Define VIF device current status.
-
Definition
typedef struct MI_VIF_VIFDevStatus_s { MI_VIF_GROUP GroupId; MI_BOOL bGroupCreated; MI_U32 bDevEn; MI_VIF_SNRPad_e eSensorPadID; MI_U32 u32PlaneID; } MI_VIF_DevStatus_t; -
Member
Member Name Description GroupId Device Group number bGroupCreated Group current Create status bDevEn VIF Dev current enable status eSensorPadID VIF Dev bound SensorPad u32PlaneID VIF Dev bound PlaneId -
Related data types and interfaces
3.15. MI_VIF_CALLBK_FUNC¶
-
Description
Define callback function type
-
Definition
typedef MI_S32 (*MI_VIF_CALLBK_FUNC)(MI_U64 u64Data);
-
Related data types and interfaces
3.16. MI_VIF_CallBackMode_e¶
-
Description
Define callback mode.
-
Definition
typedef enum { E_MI_VIF_CALLBACK_ISR, E_MI_VIF_CALLBACK_MAX, } MI_VIF_CallBackMode_e; -
Member
Member Name Description E_MI_VIF_CALLBACK_ISR Hardware interrupt mode callback E_MI_VIF_CALLBACK_MAX Callback mode Max -
Related data types and interfaces
3.17. MI_VIF_IrqType_e¶
-
Description
Define hardware interrupt type
-
Definition
typedef enum { E_MI_VIF_IRQ_FRAMESTART, //frame start irq E_MI_VIF_IRQ_FRAMEEND, //frame end irq E_MI_VIF_IRQ_LINEHIT, //frame line hit irq E_MI_VIF_IRQ_MAX, } MI_VIF_IrqType_e; -
Member
Member Name Description E_MI_VIF_IRQ_FRAMESTART VIF frame start interrupt type E_MI_VIF_IRQ_FRAMEEND VIF frame done interrupt type E_MI_VIF_IRQ_LINEHIT VIF frame line count hit type -
Note
-
E_MI_VIF_IRQ_FRAMESTART: Signal of the first pixel in each frame
-
E_MI_VPE_IRQ_ISPFRAMEDONE: Signal of the last pixel in each frame
-
E_MI_VIF_IRQ_LINEHIT:Signal of the set line coming in each frame
-
-
Related data types and interfaces
3.18. MI_VIF_CallBackParam_t¶
-
Description
Define callback parameters.
-
Definition
typedef struct MI_VIF_CallBackParam_s { MI_VIF_CallBackMode_e eCallBackMode; MI_VIF_IrqType_e eIrqType; MI_VIF_CALLBK_FUNC pfnCallBackFunc; MI_U64 u64Data; } MI_VIF_CallBackParam_t; -
Member
Member Name Description eCallBackMode Call back mode eIrqType Hardware interrupt type pfnCallBackFunc Callback function u64Data Callback function parameters -
Related data types and interfaces
3.19. MI_VIF_HDRFusionType_e¶
-
Description
Define HDR fusion type.
-
Definition
typedef enum { E_MI_VIF_HDR_FUSION_TYPE_NONE, E_MI_VIF_HDR_FUSION_TYPE_2T1, E_MI_VIF_HDR_FUSION_TYPE_3T1, E_MI_VIF_HDR_FUSION_TYPE_MAX } MI_VIF_HDRFusionType_e; -
Member
Member Name Description E_MI_VIF_HDR_FUSION_TYPE_NONE Not represent any fusion type E_MI_VIF_HDR_FUSION_TYPE_2T1 2Frame HDR mode E_MI_VIF_HDR_FUSION_TYPE_3T1 3Frame HDR mode E_MI_VIF_HDR_FUSION_TYPE_MAX HDR fusion mode Enum Max value -
Note
-
E_MI_VIF_HDR_FUSION_TYPE_2T1: 2Frame HDR with long/short exposure, internal default value even not set this fusion type when open HDR.
-
E_MI_VIF_HDR_FUSION_TYPE_3T1: 3Frame HDR, for long/medium/short exposure, only supported in Souffle.
-
-
Related data types and interfaces
3.20. MI_VIF_HDRExposureType_e¶
-
Description
Define HDR exposure type.
-
Definition
typedef enum { E_MI_VIF_HDR_EXPOSURE_TYPE_NONE, E_MI_VIF_HDR_EXPOSURE_TYPE_SHORT = 0x01, E_MI_VIF_HDR_EXPOSURE_TYPE_MEDIUM = 0x02, E_MI_VIF_HDR_EXPOSURE_TYPE_LONG = 0x04, E_MI_VIF_HDR_EXPOSURE_TYPE_MAX } MI_VIF_HDRExposureType_e; -
Member
Member Name Description E_MI_VIF_HDR_EXPOSURE_TYPE_NONE Not represent any HDR exposure E_MI_VIF_HDR_EXPOSURE_TYPE_SHORT HDR Short exposure E_MI_VIF_HDR_EXPOSURE_TYPE_MEDIUM HDR Medium exposure E_MI_VIF_HDR_EXPOSURE_TYPE_LONG HDR Long exposure E_MI_VIF_HDR_EXPOSURE_TYPE_MAX HDR exposure Enum Max Value -
Note
-
In 2Frame HDR, MI VIF will force to 0x1+0x4(short/long) exposure inside.
-
E_MI_VIF_HDR_EXPOSURE_TYPE_MEDIUM: only support in Souffle.
-
-
Related data types and interfaces
3.21. MI_VIF_MetaDataType_e¶
-
Description
Define VIF extra function type.
-
Definition
typedef enum { E_MI_VIF_METADATA_NONE, E_MI_VIF_METADATA_PDAF = 0x01, E_MI_VIF_METADATA_HEADER = 0x02, E_MI_VIF_METADATA_AE_STAT = 0x04, E_MI_VIF_METADATA_AWB_STAT = 0x08, E_MI_VIF_METADATA_MAX } MI_VIF_MetaDataType_e; -
Member
Member Name Description E_MI_VIF_METADATA_NONE Not represent any function E_MI_VIF_METADATA_PDAF PDAF function E_MI_VIF_METADATA_HEADER Header not compress function E_MI_VIF_METADATA_AE_STAT STA function AE statistics E_MI_VIF_METADATA_AWB_STAT STA function AWB statistics E_MI_VIF_METADATA_MAX Metadata enum Max value -
Related data types and interfaces
3.22. MI_VIF_MetaDataAttr_t¶
-
Description
Define VIF extra function structure.
-
Definition
typedef struct MI_VIF_MetaDataAttr_s { MI_U32 u32MetaDataTypeMask; MI_SYS_WindowRect_t stCropRect; // For header usage only } MI_VIF_MetaDataAttr_t; -
Member
Member Name Description u32MetaDataTypeMask Extra function onoff Mask value stCropRect Crop window of Header not compress function -
Related data types and interfaces
3.23. MI_VIF_CustCmd_e¶
-
Description
Define VIF customer command id.
-
Definition
typedef enum { E_MI_VIF_CUSTCMD_PUTNUCDATA, E_MI_VIF_CUSTCMD_SETIRSTATUS, E_MI_VIF_CUSTCMD_MAX } MI_VIF_CustCmd_e; -
Member
Member Name Description Data Type E_MI_VIF_CUSTCMD_PUTNUCDATA command for putting NUC buffer to MI VIF MI_VIF_PutDataAttr_t E_MI_VIF_CUSTCMD_SETIRSTATUS command for setting IR status to MI VIF MI_U8 E_MI_VIF_CUSTCMD_MAX customer command id enum Max value NA -
Note
- E_MI_VIF_CUSTCMD_PUTNUCDATA: This command only use when Input is Thermal Sensor, customer will process NUC correction algorithm by AD data get from Thermal Sensor, then put NUC data into VIF by this command, and VIF will transfer this NUC data to Thermal Sensor.
- E_MI_VIF_CUSTCMD_SETIRSTATUS: This command is for Windows Hello function, customer will set IR status(ON:1 OFF:0) to VIF by this cmd, then VIF will put this IR flag into buffer info, so customer can get IR status when they get output buffer.
-
Related data types and interfaces
3.24. MI_VIF_PutDataAttr_t¶
-
Description
Define VIF input data structure.
-
Definition
typedef struct MI_VIF_PutDataAttr_s { MI_U32 u32Stride; MI_U32 u32Buffsize; MI_PHY phyAddr; } MI_VIF_PutDataAttr_t; -
Member
Member Name Description u32Stride Input data byte count of one line u32Buffsize Input data buffer size phyAddr Input data buffer address -
Related data types and interfaces
4. VIF ERROR CODE¶
VIF API error code is defined in following table:
| Error code | Macro definition | Description |
|---|---|---|
| 0xA0062001 | MI_ERR_VIF_INVALID_DEVID | Video Input device ID invalid |
| 0xA0062002 | MI_ERR_VIF_INVALID_CHNID | Video Input channel ID invalid |
| 0xA0062003 | MI_ERR_VIF_INVALID_PARA | Video Input parameter invalid |
| 0xA0062006 | MI_ERR_VIF_INVALID_NULL_PTR | Null pointer invalid |
| 0xA0062007 | MI_ERR_VIF_FAILED_NOTCONFIG | Video device or channel attribute is not configured |
| 0xA0062008 | MI_ERR_VIF_NOT_SUPPORT | Operation is not supported |
| 0xA0062009 | MI_ERR_VIF_NOT_PERM | Operation is not permitted |
| 0xA006200C | MI_ERR_VIF_NOMEM | Memory allocation fail |
| 0xA006200E | MI_ERR_VIF_BUF_EMPTY | Buffer empty |
| 0xA006200F | MI_ERR_VIF_BUF_FULL | Buffer full |
| 0xA0062010 | MI_ERR_VIF_SYS_NOTREADY | Video Input system is not ready |
| 0xA0062012 | MI_ERR_VIF_BUSY | Video Input system is busy |
| 0xA0062080 | MI_ERR_VIF_INVALID_PORTID | Video Input port ID invalid |
| 0xA0062081 | MI_ERR_VIF_FAILED_DEVNOTENABLE | Video Input device is not enable |
| 0xA0062082 | MI_ERR_VIF_FAILED_DEVNOTDISABLE | Video Input device is not disable |
| 0xA0062083 | MI_ERR_VIF_FAILED_PORTNOTENABLE | Video Input channel is not enable |
| 0xA0062084 | MI_ERR_VIF_FAILED_PORTNOTDISABLE | Video Input channel is not disable |
| 0xA0062085 | MI_ERR_VIF_CFG_TIMEOUT | Video configure timeout |
| 0xA0062086 | MI_ERR_VIF_NORM_UNMATCH | Video norm of ADC and VIU unmatched |
| 0xA0062087 | MI_ERR_VIF_INVALID_WAYID | Video way ID invalid |
| 0xA0062088 | MI_ERR_VIF_INVALID_PHYCHNID | Video physical channel ID invalid |
| 0xA0062089 | MI_ERR_VIF_FAILED_NOTBIND | Video channel is not bound |
| 0xA006208A | MI_ERR_VIF_FAILED_BINDED | Video channel is bound |
5. PROCFS INTRODUCTION¶
5.1. cat¶
-
Debug Information
#cat /proc/mi_modules/mi_vif/mi_vif0
----------------------------------dump Group Attr-------------------------------------------------- Group input Intf Work Clkedge Hdr 0 0 MIPI 1MULTIPLEX 0 0
----------------------------------dump Dev Attr-------------------------------------------------- Dev Chn FsCnt FsInt Active FdCnt incrop infmt capsel 0 0 187 33103 32444 186( 0, 0,1920,1080) GB_12BPP 0 Dev AsyncCnt EnqCnt BarCnt CheckCnt DequCnt DropCnt 0 561 188 188 746 186 0 -------------------------------------dump channel attr----------------------------------------------- Dev Port Chn Output Hdn crop Dest Pixel Compress 0 0 0 0 0( 0, 0,1920,1080)(1920x1080) 47 0 -------------------------------------dump outport attr----------------------------------------------- Dev Port Ouptput FsNum FsInt LCNum DoneNum Dvcnt Oscnt TaskId BufAddr 0 0 0 187 33104 187 186 0 0 ( 0, 0,bb,ba) ( 0, 0, 38d600, 96000) Dev Port Cap_size Dest_size Fmt Rate CRC Atom MetaInfo OutCount Addr0Cnt FailCount EnqFailCount Fps 0 0(0,0,1920,1080)(1920,1080) GB_12BPP 0 0 2 bb 186 0 0 0 30.20 Dev PortOutput Recv_size Out_size SubOut_size FifoDepth WInactive 0 0 0(1920,1080) ( 180,1080) ( 0, 0) 1 0 -
Debug Information Analysis
Record the current VIF usage status and Group/ Dev/ pipe/ outport attributes, you can get this information dynamically, which is convenient for debugging and testing.
-
Parameter Description
Parameter Description Group Attr GroupId Group ID input input ID Intf Protocol for entering data, please refer toMI_VIF_IntfMode_e Work Work mode, please refer toMI_VIF_WorkMode_e Clkedge Clock edge trigger mode, please refer toMI_VIF_ClkEdge_e Hdr Hdr type, please refer to MI_VIF_HDRType_e Dev Attr Dev Dev ID chn channel ID, actually used device id FsCnt Interrupt count of Frame start FsInt Interval between two Frame start(unit:us) Active timing of active data transmission FdCnt Interrupt count of Frame done incrop Input Corp Size, please refer toMI_VIF_DevAttr_t stInputRect infmt Input pixel format, please refer toMI_VIF_DevAttr_t eInputPixel capsel Field type, please refer toMI_VIF_DevAttr_t Field AsyncCnt/EnqCnt/ BarCnt/CheckCnt/ DequCnt MI internal Callback interface execution times DropCnt Drop frame count channel Attr Dev Dev ID Port Port ID Chn >channel ID, actually used device id Output Output ID, VIF internal pipe ID Hdn H2T1PMode enable, please refer toMI_VIF_DevAttr_t bEnH2T1PMode crop output crop size (Height will divide 2 in DI Mode) Dest output size (Height will divide 2 in DI Mode) Pixel Mhal output Pixel, transferred by MI pixel Compress Please refer to MI_VIF_OutputPortAttr_t eCompressMode OutPort Attr Dev Device id Port Port id Output Output ID, VIF internal pipe ID FsNum Count of Wdma Frame start Interrupt FsInt Interval of Wdma Frame start Interrupt(unit:us) LCNum Count of Wdma Line Count hit DoneNum Count of Wdma Done DvCnt Count of Wdma Double vsync OsCnt Count of Wdma Oversize TaskId Current Wdma used fifo customer id BufAddr Current Wdma used buffer addr Cap_size Port Crop Size, please refer to MI_VIF_OutputPortAttr_t stCapRect Dest_size Output size, please refer to MI_VIF_OutputPortAttr_t stDestSize Fmt Output pixel format, please refer toMI_VIF_OutputPortAttr_t ePixFormat Rate Frame rate type, please refer toMI_VIF_OutputPortAttr_t eFrameRate CRC CRC on/off status Atom The number of buffers held by driver MetaInfo Frame id OutCount Output frame count, only done frame, not include drop frame Addr0Cnt Frame address 0 count, means skip frame count FailCount Failed to get outputbuffer count EnqFailCount Count which failed to queue buffer to wdma Fps Frame per second Recv_size Vif hardware received size Out_size Port0 wdma size setting FifoDepth Buffer count in wdma fifo WdmaInactive Wdma is active or not, 0: active, 1: inactive
5.2. echo¶
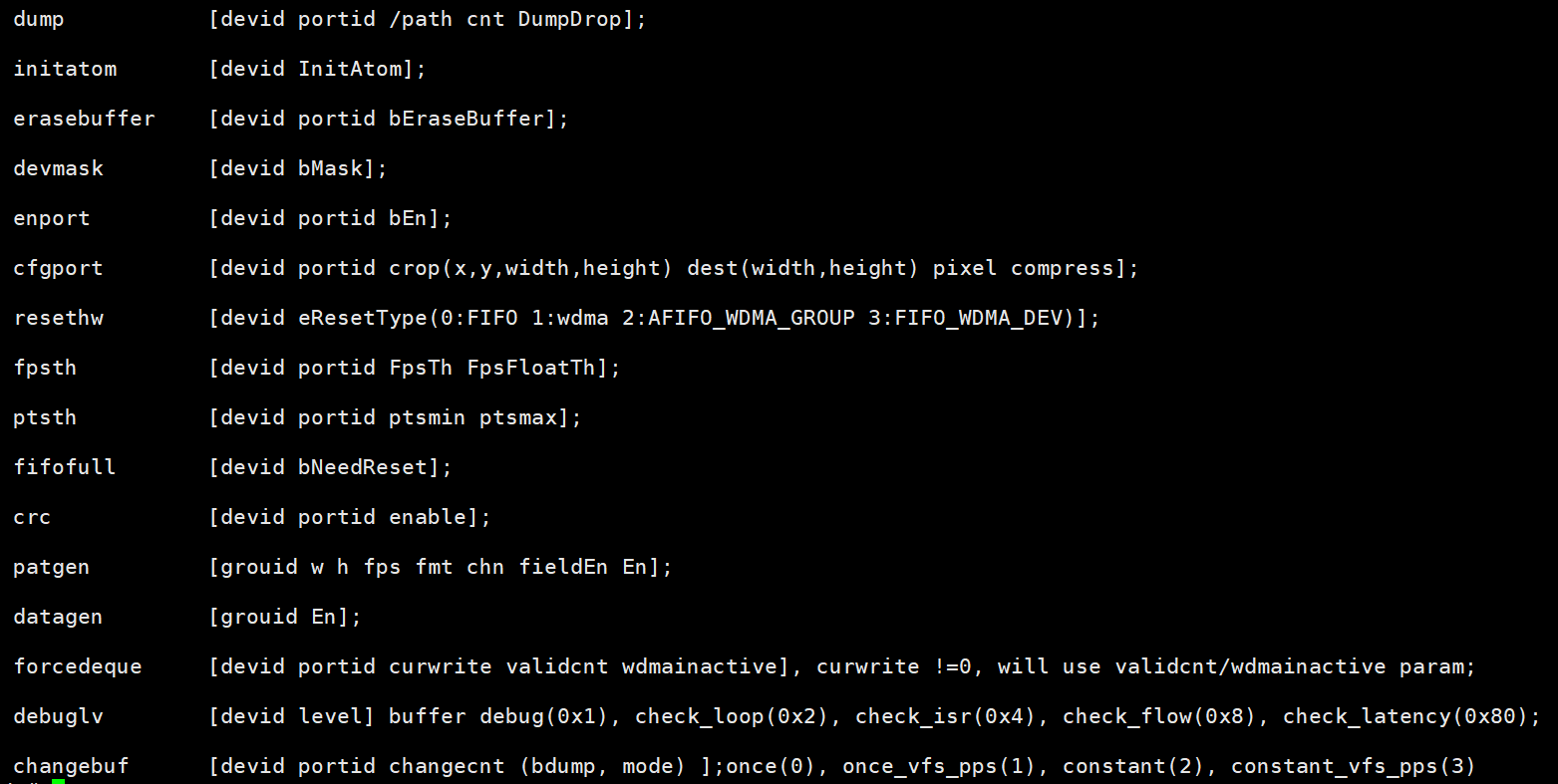
Echo help can view available commands:
# echo help >/proc/mi_modules/mi_vif/mi_vif0
| Function | Dump frame to the specified path. |
|---|---|
| Command | echo dump [devid portid path cnt dumpdrop] > /proc/mi_modules/mi_vif/mi_vif0 |
| Parameter Description |
devid: device id portid: port id path: Dumped path cnt: optional, frame count need to be dumped, default 1 dumpdrop: optional, only dump frame need to be dropped, default FALSE |
| Example | echo dump 0 0 /tmp > /proc/mi_modules/mi_vif/mi_vif0 echo dump 0 0 /tmp 2 1 > /proc/mi_modules/mi_vif/mi_vif0 |
| Function | Set the number of vif atoms. |
|---|---|
| Command | echo initatom [devid portid InitAtom] > /proc/mi_modules/mi_vif/mi_vif0 |
| Parameter Description |
devid: device id portid: port id InitAtom: The maximum number of buffers held by the Driver |
| Example | echo initatom 0 0 2 > /proc/mi_modules/mi_vif/mi_vif0 |
| Function | Erase vif buffer |
|---|---|
| Command | echo erasebuffer [devid portid bEraseBuffer] > /proc/mi_modules/mi_vif/mi_vif0 |
| Parameter Description |
devid: device id portid: port id EraseBuffer: Enable to erase buffer |
| Example | echo erasebuffer 0 0 1 > /proc/mi_modules/mi_vif/mi_vif0 |
| Function | Set Dev Mask |
|---|---|
| Command | echo devmask [devid bMask] > /proc/mi_modules/mi_vif/mi_vif0 |
| Parameter Description |
devid: device id bmask: Enable mask |
| Example | echo devmask 0 1 > /proc/mi_modules/mi_vif/mi_vif0 |
| Function | Enable output port |
|---|---|
| Command | echo enport [devid portid bEn] > /proc/mi_modules/mi_vif/mi_vif0 |
| Parameter Description |
devid: device id portid: port id bEn: enable |
| Example | echo enport 0 0 1 > /proc/mi_modules/mi_vif/mi_vif0 |
| Function | Set output port attribute |
|---|---|
| Command | echo cfgport [devid portid crop(x,y,width,height) dest(width,height) pixel compress] > /proc/mi_modules/mi_vif/mi_vif0 |
| Parameter Description |
devid: device id portid: port id crop(x,y,width,height): output port crop position dest(width,height): output size Pixel: output port pixel format compress: compress mode |
| Example | echo cfgport 0 0 0 0 1280 720 1280 720 14 5 > /proc/mi_modules/mi_vif/mi_vif0 |
| Function | Reset vif |
|---|---|
| Command | echo resethw [devid eResetType] > /proc/mi_modules/mi_vif/mi_vif0 |
| Parameter Description |
devid: device id eResetType: reset position. 0:FIFO; 1:wdma; 2:AFIFO_WDMA_GROUP; 3:FIFO_WDMA_DEV |
| Example | echo resethw 0 3 > /proc/mi_modules/mi_vif/mi_vif0 |
| Function | Set fps threshold. When fps less than threshold, warning will be reported. |
|---|---|
| Command | echo fpsth [devid portid FpsTh FpsFloatTh] > /proc/mi_modules/mi_vif/mi_vif0 |
| Parameter Description |
devid: device id portid: port id FpsTh: fps integer threshold FpsFloatTh: fps decimal threshold |
| Example | echo enport 0 0 29 98 > /proc/mi_modules/mi_vif/mi_vif0 |
| Function | Set pts interval threshold. When pts is not in the range of threshold, warning will be reported. |
|---|---|
| Command | echo ptsth [devid portid ptsmin ptsmax] > /proc/mi_modules/mi_vif/mi_vif0 |
| Parameter Description |
devid: device id portid: port id ptsmin: pts interval min threshold(us) ptsmax: pts interval max threshold(us) |
| Example | echo ptsth 0 0 25000 40000 > /proc/mi_modules/mi_vif/mi_vif0 |
| Function | Trigger fifo full reset flow |
|---|---|
| Command | echo fifofull [devid bNeedReset] > /proc/mi_modules/mi_vif/mi_vif0 |
| Parameter Description |
devid: device id bNeedReset: set 1 to trigger fifo full reset flow |
| Example | echo fifofull 0 1 > /proc/mi_modules/mi_vif/mi_vif0 |
| Function | Enable CRC check |
|---|---|
| Command | echo crc [devid portid enable] > /proc/mi_modules/mi_vif/mi_vif0 |
| Parameter Description |
devid: device id portid: port id enable: set 1 to enable CRC |
| Example | echo crc 0 0 1 > /proc/mi_modules/mi_vif/mi_vif0 |
| Function | Set MI VIF debug level |
|---|---|
| Command | echo debuglv [devid debuglevel] > /proc/mi_modules/mi_vif/mi_vif0 |
| Parameter Description |
devid: device id debuglevel: MI VIF debug level, default 0, off 0x0001 Mhal_Buff_Dbg 0x0002 CHECK_LOOP 0x0004 CHECK_ISR 0x0008 CHECK_FLOW 0x0080 CHECK_LATENCY |
| Example | echo debuglv 0 3 > /proc/mi_modules/mi_vif/mi_vif0 |
| Function | Enable VIF pattern gen |
|---|---|
| Command | echo patgen [group width height fps pixel multi bFieldEn Enable] > /proc/mi_modules/mi_vif/mi_vif0 |
| Parameter Description |
Group: group ID Width: pattern width Height: pattern height Fps: output frame per second Pixel: pattern pixel format Multi: can be set to 1chn/2chn/4chn, the same as BT656 multichn concept bFieldEn: enable DI mode Enable: enable pattern |
| Example | echo patgen 0 1280 720 25 14 4 0 1 > /proc/mi_modules/mi_vif/mi_vif0 |
| Function | Enable VIF data gen |
|---|---|
| Command | echo datagen [group Enable] > /proc/mi_modules/mi_vif/mi_vif0 |
| Parameter Description |
group: group ID Enable: enable data gen |
| Example | echo datagen 0 1 > /proc/mi_modules/mi_vif/mi_vif0 |
| Function | Force deque vif buffer, used for debugging when the buffer is stuck in vif. |
|---|---|
| Command | echo forcedeque [devid portid CurrentWriteAddr ValidCnt WdmaInactive] > /proc/mi_modules/mi_vif/mi_vif0 |
| Parameter Description |
devid: device id Portid: port id CurrentWriteAddr: address which WMDA is writing ValidCnt: buffer count which stay in WDMA FIFO WdmaInactive: wdma status, 0: active, 1: inactive |
| Example | echo forcedeque 0 0 0 0 1 > /proc/mi_modules/mi_vif/mi_vif0 |
| Function | Change VIF output buffer randomly |
|---|---|
| Command | echo changebuf [devid portid cnt bdump mode] > /proc/mi_modules/mi_vif/mi_vif0 |
| Parameter Description |
devid: device id portid: port id Cnt: buffer count which need to be changed bdump: optional, dump change buffer or not, default FALSE not dump Mode: optional, different mode to change buffer, default mode 0 0: Only change buffer by the count which user set 1: For SFBC0 compress, only change count which user set, but change position within SFBC0 PPS header 2: Change every output buffer, and not refer to parameter “cnt” 3: Change every output buffer, change position include 50% SFBC0 PPS and 50% Non-PPS, and not refer to parameter “cnt” |
| Example | echo changebuf 0 0 3 > /proc/mi_modules/mi_vif/mi_vif0 echo changebuf 0 0 3 1 2 > /proc/mi_modules/mi_vif/mi_vif0 |
6. MODPARAM INTRODUCTION¶
6.1. json file sample¶
json
{
"E_MI_MODULE_ID_VIF" :
{
"bSupportIrq" : 1,
"bUseReset" : 1,
"u32threadPriority" : 98,
"u32CpuMaskAffinity" : 0,
"bUseFixedOutput" : 0,
"u32DevDebugLevel" : [0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0],
"u32ChnNeedUseOuputId" : [255,255,255,255,255,255,255,255,255,255,255,255,255,255,255,255],
"bCrcEnable" : [0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0],
"u8CompressMode" : [255,255,255,255,255,255,255,255,255,255,255,255,255,255,255,255],
"u8ChangeBufMode" : [0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0],
"VifExternalConfig" : "/config/sensor_v3.json",
"u32PatGen" : [0,0,0,0,0,0,0,0],
}
}
modparam.json file is under /config, parameters under section "E_MI_MODULE_ID_VIF" will be loaded when vif initialize.
modparam.json could only fill parameters which you need, others will be default value inside MI vif.
6.2. VIF parameters and description¶
| Parameters | Default | Support platform | Customer configuration | Function |
|---|---|---|---|---|
| bSupportIrq | 1 | All Chip | N | Configure vif timer, 0: timer on, for quick start to push buffer |
| bUseReset | 1 | All Chip | Y | Configure if use reset when fifo full happen |
| u32threadPriority | 98 | All Chip | N | Configure mi vif thread priority |
| u32CpuMaskAffinity | 0 | All Chip | N | Configure which cpu mi vif thread run on, use by mask |
| u32DevDebugLevel | 0 | All Chip | Y | Configure mi vif debug log level |
| bUseFixedOutput | 0 | Pcupid/Iford | N | Configure if dev outputs fixed ID, 0: allocated dynamically, 1: fixed by u32ChnNeedUseOuputId |
| u32ChnNeedUseOuputId | 255 | Pcupid/Iford | N | Configure Output ID used by DEV |
| bCrcEnable | 0 | Mochi/Maruko/Opera/Souffle | Y | Configure crc enable |
| u8CompressMode | 255 | All Chip | Y | Configure compress mode |
| u8ChangeBufMode | 0 | All Chip | N | Configure mode of changing vif output buffer |
| u32PatGen | 0,0,0,0,0,0,0,0 | Mochi/Maruko/Opera/Souffle | N | Configure vif group pattern gen attribute |
6.3. PARAMETER USAGE EXAMPLE¶
6.3.1. bUseReset¶
This parameter controls whether to reset the VIF upon FIFO full condition.
-
"bUseReset":0, do not reset when fifo full
-
"bUseReset":1, reset when fifo full
6.3.2. u32DevDebugLevel¶
This parameter controls the debug level for each MI_VIF device. Debug levels can be combined using bitwise OR operations. The level definitions are as follows:
| debug level | meaning |
|---|---|
| 0x0001 | enable MI_VIF internal buffer check log |
| 0x0002 | enable MI_VIF internal buffer transmission log |
| 0x0004 | enable MI_VIF internal interrupt log |
| 0x0008 | enable MI_VIF internal flow log |
| 0x0080 | enable MI_VIF latency check log |
-
"u32DevDebugLevel":0, disable all MI_VIF debug level
-
"u32DevDebugLevel":9, enable buffer check and buffer transmission level
-
"u32DevDebugLevel":143, enable all MI_VIF debug level
6.3.3. bCrcEnable¶
This parameter controls the CRC verification switch for VIF data integrity checking.
-
"bCrcEnable":0, disable VIF CRC
-
"bCrcEnable":1, enable VIF CRC
6.3.4. u8CompressMode¶
This parameter controls the FBC (Frame Buffer Compression) enable/disable switch for the VIF module, VIF FBC only supports to compress 12bit/pixel to 8bit/pixel
-
"u8CompressMode":0, disable VIF FBC
-
"u8CompressMode":4, enable VIF FBC