Gesture Recognition Algorithm
REVISION HISTORY¶
| Revision No. | Description |
Date |
|---|---|---|
| 101 | 03/22/2024 |
1. Algorithm Description¶
The gesture recognition algorithm primarily recognizes 13 types of gestures:
- Static gestures (10 types): L, dislike, ok, fist, stop, like, yes, one, call, rock
- Dynamic gestures (3 types): wave_up, wave_down, grip
-
When in use, please follow the standard gestures shown in the figure below to ensure the effectiveness of the algorithm:

Model Introduction:
| model | Function | Resolution(w*h) | Input Format |
|---|---|---|---|
| handpose_det36m.img | Gesture Detection (Medium) | 640*352 | yuvsp420_nv12 |
| handpose_det48m.img | Gesture Detection (Medium) | 800*480 | yuvsp420_nv12 |
| handpose_det36l.img | Gesture Detection (Large) | 640*352 | yuvsp420_nv12 |
| handpose_det48l.img | Gesture Detection (Large) | 800*480 | yuvsp420_nv12 |
| handpose_cls.img | Gesture Pose Classification | 224*224 | yuvsp420_nv12 |
2. Interface Calling Process¶
The algorithm interface calling process is ALGO_HandPose_CreateHandle->ALGO_HandPose_InitHandle->ALGO_HandPose_GetInputAttr->ALGO_HandPose_SetParams->ALGO_HandPose_Detect->ALGO_HandPose_Cls->ALGO_HandPose_DeinitHandle->ALGO_HandPose_ReleaseHandle.
3. Functional Module API¶
| API Name | Function |
|---|---|
| ALGO_HandPose_CreateHandle | Create Handle |
| ALGO_HandPose_InitHandle | Initialize Handle |
| ALGO_HandPose_GetInputAttr | Get Input Attributes |
| ALGO_HandPose_SetParams | Set Parameters |
| ALGO_HandPose_Detect | Hand Detection |
| ALGO_HandPose_Cls | Gesture Recognition |
| ALGO_HandPose_DeinitHandle | Handle Deinitialization |
| ALGO_HandPose_ReleaseHandle | Release Handle |
3.1. ALGO_HandPose_CreateHandle¶
-
Function
Create Handle
-
Syntax
MI_S32 ALGO_HandPose_CreateHandle(void** handle);
-
Parameters
Parameter Name Description Input/Output handle Handle Output -
Return Value
0: Success.
Non-zero: Failure.
-
Dependency
Header File: sgs_pose_api.h
Library File: libsgsalgo_pose.so, libsgsalgo_pose.a
3.2. ALGO_HandPose_InitHandle¶
-
Function
Initialize Handle
-
Syntax
MI_S32 ALGO_HandPose_InitHandle(void *handle, const PoseInit_t *init);
-
Parameters
Parameter Name Description Input/Output handle Handle Input init Initialization Parameters Input -
Return Value
0: Success.
Non-zero: Failure.
-
Dependency
Header File: sgs_pose_api.h
Library File: libsgsalgo_pose.so, libsgsalgo_pose.a
3.3. ALGO_HandPose_GetInputAttr¶
-
Function
Get Input Attributes
-
Syntax
MI_S32 ALGO_HandPose_GetInputAttr(void *handle, PoseInputAttr_t *det_input_attr, PoseInputAttr_t *cls_input_attr);
-
Parameters
Parameter Name Description Input/Output handle Handle Input det_input_attr Detection Model Input Attributes (Width, Height, Image Format) Output cls_input_attr Recognition Model Input Attributes (Width, Height, Image Format) Output -
Return Value
0: Success.
Non-zero: Failure.
-
Dependency
Header File: sgs_pose_api.h
Library File: libsgsalgo_pose.so, libsgsalgo_pose.a
3.4. ALGO_HandPose_SetParams¶
-
Function
Set Parameters
-
Syntax
MI_S32 ALGO_HandPose_SetParams(void *handle, const PoseParams_t* params);
-
Parameters
Parameter Name Description Input/Output handle Handle Input params Parameters Input -
Return Value
0: Success.
Non-zero: Failure.
-
Dependency
Header File: sgs_pose_api.h
Library File: libsgsalgo_pose.so, libsgsalgo_pose.a
3.5. ALGO_HandPose_Detect¶
-
Function
Hand Detection
-
Syntax
MI_S32 ALGO_HandPose_Detect(void *handle, const PoseInput_t *input, PoseBox_t boxes[MAX_POSE_OBJECT], MI_S32 *num_boxes);
-
Parameters
Parameter Name Description Input/Output handle Handle Input input Detection Model Input Data 800*480 yuv420_nv12 Input boxes Detection Box Results Output num_boxes Number of Detection Boxes Output -
Return Value
0: Success.
Non-zero: Failure.
-
Dependency
Header File: sgs_pose_api.h
Library File: libsgsalgo_pose.so, libsgsalgo_pose.a
3.6. ALGO_HandPose_Cls¶
-
Function
Hand Pose Recognition, identifying which gesture among the 13 gestures
-
Syntax
MI_S32 ALGO_HandPose_Cls(void *handle, const PoseInput_t *input, PoseBox_t* box, PoseCls_t* cls);
-
Parameters
Parameter Name Description Input/Output handle Handle Input input Recognition Model Input Data 224*224 yuv420_nv12 Input box Hand Detection Box Input cls Hand Pose Result Output -
Return Value
0: Success.
Non-zero: Failure.
-
Dependency
Header File: sgs_pose_api.h
Library File: libsgsalgo_pose.so, libsgsalgo_pose.a
3.7. ALGO_HandPose_DeinitHandle¶
-
Function
Handle Deinitialization
-
Syntax
MI_S32 ALGO_HandPose_DeinitHandle(void *handle);
-
Parameters
Parameter Name Description Input/Output handle Handle Input -
Return Value
0: Success.
Non-zero: Failure.
-
Dependency
Header File: sgs_pose_api.h
Library File: libsgsalgo_pose.so, libsgsalgo_pose.a
3.8. ALGO_HandPose_ReleaseHandle¶
-
Function
Release Handle
-
Syntax
MI_S32 ALGO_HandPose_ReleaseHandle(void *handle);
-
Parameters
Parameter Name Description Input/Output handle Handle Input -
Return Value
0: Success.
Non-zero: Failure.
-
Dependency
Header File: sgs_pose_api.h
Library File: libsgsalgo_pose.so, libsgsalgo_pose.a
4. Data Types¶
| Data Type | Definition |
|---|---|
| PoseInit_t | Initialization Parameter Structure |
| PoseInput_t | Input Image Property Structure |
| PoseInputAttr_t | Model Input Data Structure |
| PoseCls_t | Gesture Recognition Result Structure |
| PoseBox_t | Hand Detection Box Structure |
| PoseParams_t | Input Parameters Structure |
| HandPoseClass_e | Gesture Category Information |
| HandKeyPoint_e | Hand Key Point Category Information |
4.1. PoseInit_t¶
-
Description
Initialization Parameter Structure
-
Definition
typedef struct { char ipu_firmware_path[MAX_POSE_STRLEN]; char pose_model[MAX_POSE_STRLEN]; char cls_model[MAX_POSE_STRLEN]; MI_BOOL create_device; MI_BOOL destroy_device; } PoseInit_t; -
Members
Member Name Description ipu_firmware_path ipu_firmware_bin path pose_model Detection Model Path (e.g., ./models/handpose_det48y_20240313.img) cls_model Recognition Model Path (e.g., ./models/handpose_cls_20240222.img) create_device Whether to create device: if false, need to create device externally; if true, create device automatically within the algorithm library destroy_device Whether to destroy device: if false, need to destroy device externally; if true, destroy device automatically within the algorithm library -
Related Interfaces
4.2. PoseInput_t¶
-
Description
Input Image Data Structure
-
Definition
typedef struct { void *p_vir_addr; MI_PHY phy_addr; MI_U32 buf_size; MI_U64 pts; MI_U16 width; MI_U16 height; } PoseInput_t; -
Members
Member Name Description p_vir_addr Virtual Address phy_addr Physical Address buf_size Data Size pts Timestamp (can be left unassigned) width Image Width height Image Height -
Related Data Types and Interfaces
4.3. PoseInputAttr_t¶
-
Description
Model Input Attribute Structure
-
Definition
typedef struct { MI_U32 width; MI_U32 height; MI_IPU_ELEMENT_FORMAT format; } PoseInputAttr_t; -
Members
Member Name Description width Input Image Width height Input Image Height format Input Image Format -
Related Data Types and Interfaces
4.4. PoseCls_t¶
-
Description
Gesture Recognition Result Structure
-
Definition
typedef struct { MI_S32 cls; MI_FLOAT score; } PoseCls_t; -
Members
Member Name Description cls Gesture Category (Corresponding relationship see HandPoseClass_e) score Gesture Category Score -
Related Data Types and Interfaces
4.5. PoseBox_t¶
-
Description
Hand Detection Box Structure
-
Definition
typedef struct { MI_U32 x; MI_U32 y; MI_U32 width; MI_U32 height; MI_S32 cls; MI_FLOAT score; MI_U64 pts; MI_FLOAT keypts[MAX_POSE_NUM_KEYPTS][2]; MI_U64 track_id; } PoseBox_t; -
Members
Member Name Description x Box's top-left X coordinate y Box's top-left Y coordinate width Box's Width height Box's Height cls Box's Category score Box's Score pts Timestamp (can be left unassigned) keypts Key Point Sequence track_id Tracking ID -
Related Data Types and Interfaces
4.6. PoseParams_t¶
-
Description
Input Parameters Structure
-
Definition
typedef struct { MI_S32 disp_width; MI_S32 disp_height; MI_FLOAT min_width; MI_FLOAT min_height; MI_FLOAT det_threshold; MI_FLOAT cls_threshold; MI_FLOAT attr_threshold[MAX_POSE_NUM_ATTR]; } PoseParams_t; -
Members
Member Name Description disp_width Display Width disp_height Display Height min_width Minimum Width for Detection min_height Minimum Height for Detection det_threshold Detection Threshold cls_threshold Recognition Threshold (the higher the threshold, the stricter the recognition criteria) attr_threshold Attribute Threshold (unused in gesture recognition) -
Related Data Types and Interfaces
4.7. HandPoseClass_e¶
-
Description
Gesture Category Information
-
Definition
typedef enum { E_HAND_POSE_NONE = 0, E_HAND_POSE_CALL, E_HAND_POSE_DISLIKE, E_HAND_POSE_FIST, E_HAND_POSE_FOUR, E_HAND_POSE_LIKE, E_HAND_POSE_MUTE, E_HAND_POSE_OK, E_HAND_POSE_ONE, E_HAND_POSE_PALM, E_HAND_POSE_PEACE, E_HAND_POSE_ROCK, E_HAND_POSE_STOP, E_HAND_POSE_STOP_INV, E_HAND_POSE_THREE, E_HAND_POSE_TWO_UP, E_HAND_POSE_TWO_UP_INV, E_HAND_POSE_THREE2, E_HAND_POSE_PEACE_INV, E_HAND_POSE_DOWN_INV, E_HAND_POSE_L, E_HAND_POSE_WAVE_UP, E_HAND_POSE_WAVE_DOWN, E_HAND_POSE_GRIP, E_NUM_HAND_POSE } HandPoseClass_e; -
Related Data Types and Interfaces
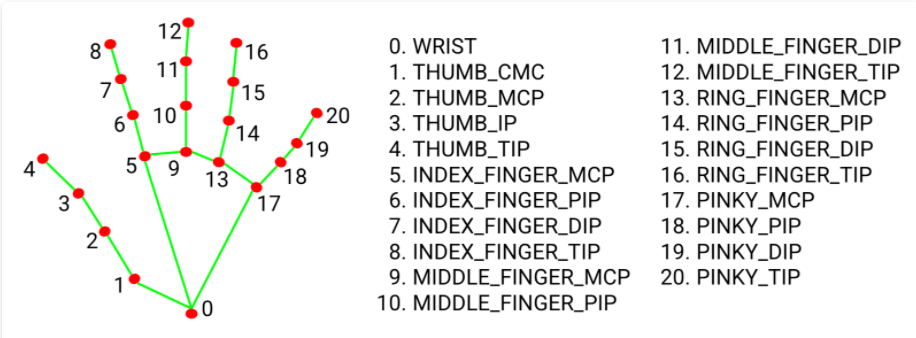
4.8. HandKeyPoint_e¶
-
Description
Hand Key Point Category Information
-
Definition
typedef enum { E_WRIST = 0, E_THUMB_CMC, E_THUMB_MCP, E_THUMB_IP, E_THUMB_TIP, E_INDEX_FINGER_MCP, E_INDEX_FINGER_PIP, E_INDEX_FINGER_DIP, E_INDEX_FINGER_TIP, E_MIDDLE_FINGER_MCP, E_MIDDLE_FINGER_PIP, E_MIDDLE_FINGER_DIP, E_MIDDLE_FINGER_TIP, E_RING_FINGER_MCP, E_RING_FINGER_PIP, E_RING_FINGER_DIP, E_RING_FINGER_TIP, E_PINKY_MCP, E_PINKY_PIP, E_PINKY_DIP, E_PINKY_TIP, E_NUM_HAND_KEYPTS } HandKeyPoint_e; -
Illustration
-
Related Data Types and Interfaces