MI TOF API
REVISION HISTORY¶
| Revision No | Description |
Date |
|---|---|---|
| 1.0 | Initial Release | 10/11/2025 |
1. Overview¶
1.1. Module Description¶
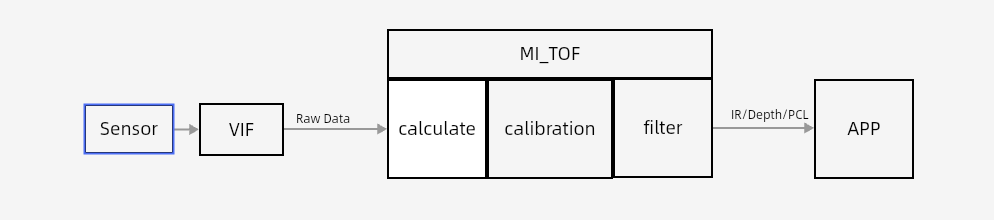
TOF (Time of Flight) calculates the distance of the target object by measuring the flight time of infrared light in the air. It is used for depth perception, 3D modeling, and gesture recognition. This article mainly introduces the MI_TOF related interfaces, which are mainly used to receive the original VIF data, perform depth calculation, correction, and filtering processing, and then output the TOF depth information.
1.2. Basic Structure¶
MI_TOF receives raw data from SENSOR->VIF, sends it to the internal algorithm processing demo calc_depth, and goes through calculate, calibration, and filter processes in sequence to output depth data.
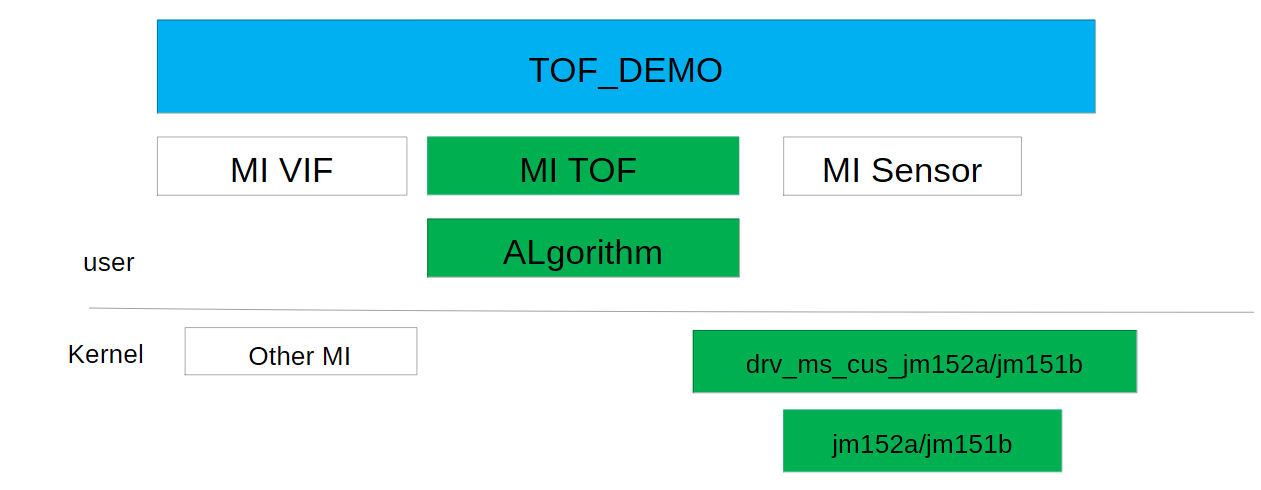
The architecture diagram based on the MI TOF is shown in the following figure:
1.TOF_DEMO:Used for processing depth data and transmitting it via UVC to the upper-level application.
2.MI VIF:Receive the data from the sensor module and send it to the TOF algorithm processing function for calculating the DEPTH data.
3.MI SENSOR:Call the underlying driver such as "drv_ms_cus_jm152a/jm152a" to obtain the raw image data
4.MI TOF/Algorithm:MI TOF api&cacl/calibration/filter algorithm
1.3. Function Introduction¶
MI TOF supports the following functions:
- Input the raw MIPI data, and calculate the IR, depth, and PCL point cloud data.
- Supports IIR/Denoise/FlyPixel and other filtering algorithms.
- The software supports automatic exposure and allows you to configure different effects through parameter settings.
- Support picture rotation and flipping.
- Parse the end data of the package.
1.4. Application Scenarios¶
Mi tof is applied to tof development under Linux.
1.5. Development Process¶
Interface calls are as follows:
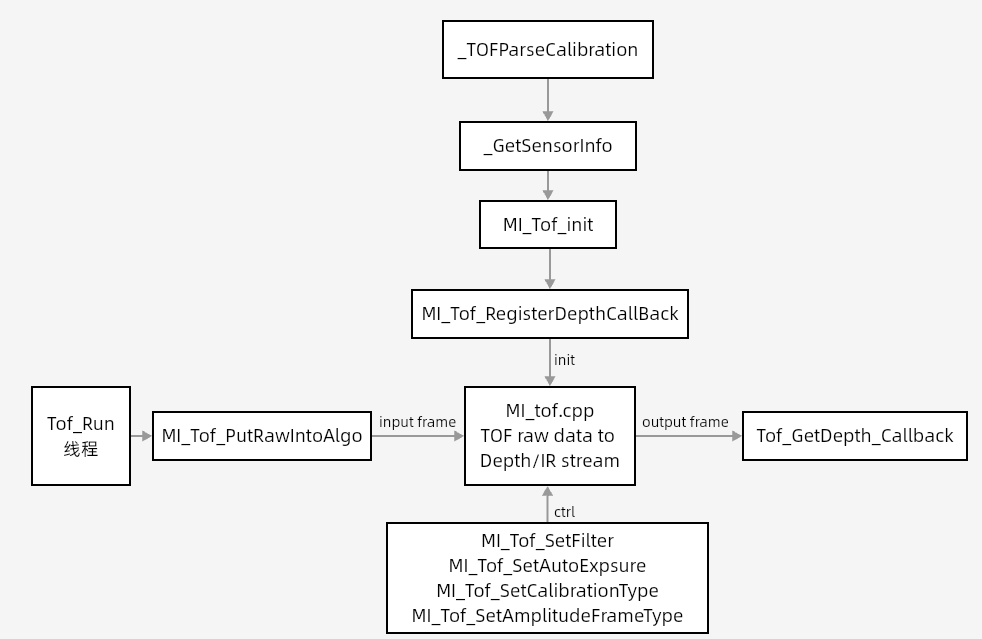
MI TOF calling process introduction:
- _TOFParseCalibration:Parse calibration file calibration.bin.
- _tof_dev_GetDeviceInfo:Obtain sensor configuration information.
- MI_TOF_init:Tof initialization, create Algorithm thread, register algorithm callback Calc_depth.
- MI_Tof_RegisterDepthCallBack:register Callback used for obtaining IR/depth/PCL;
- tof_run thread:Obtain TOF RAW data and through API MI_Tof_PutRawIntoAlgo send Algorithm thread and Cacl_Depth done calculate/calibration/filter to get IR/DEPTH/PCL data.
- Tof_GetDepth_Callback:Obtain deep data for the upper-level algorithms.
- SDK support filter/AE etc.
1.6. Example Introduction¶
This example demonstrates the development process based on the MI_TOF API.
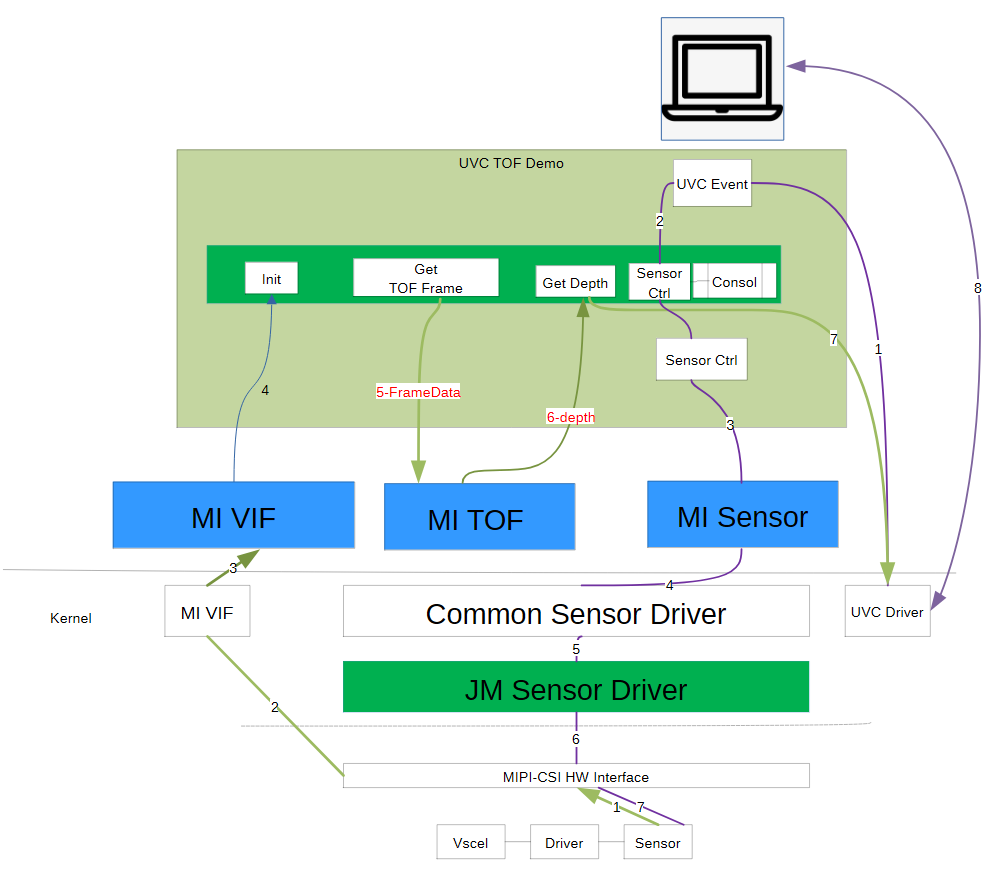
Data flow:
-
The underlying sensor collects the raw data and transmits it via MIPI to the VIF.
-
The uvc tof demo calls MI_Tof_PutRawIntoAlgo to transfer the VIF Raw data to the algorithm callback for calculation.
-
The uvc tof demo obtains data through the Tof_GetDepth_Callback function and sends it to the UVC Driver.
-
UVC transmits data to the PC end via v4l2.
Control flow:
-
The UVC driver sends the sensor control command to the uvc tof demo.
-
The bottom-level MI SENSOR receives and processes the cmd.
-
Through the set/get interfaces of the common sensor driver and the JM sensor driver, the driver is invoked.
-
Then, using MIPI, the cmd is converted into a register value and written/read into the sensor.
-
Note
The presented code cannot be directly compiled and run. Some processes are within callback functions and the sample code is not complete. For the complete code, please refer to:
sdk\verify\sample_code\source\pcupid\uvc_tof\uvc_tof_demo\st_main_uvc.cpp MI_U32 Calc_Depth(void* inputData, void* outputData, void* config) { calculate; calibration; filter; . . . pChannelParams->algoCallbackResult(channel, depth); } void* AlgorithmThread(void* arg) { FrameInf_t instFrameInf; FrameInf_t outtFrameInf; mi_tof_pack_data OutputPackId = MI_TOF_PACK_DEPTH_DATA; MI_U32 u32size = 0x0; MI_TOF_Channel_Params_t* pChannelParams = NULL; MI_U8 channel = ((mi_tof_mod_thread_Arg *)arg)->channel; MI_U8 mod = ((mi_tof_mod_thread_Arg *)arg)->mod; if (channel >= MAX_TOTAL_TOF_CHANNEL) { TOF_ERR("algorithm error channel [%d]-->%p\n", channel,arg); return NULL; } pChannelParams = pTofChannelParamsArray[channel]; const static char str[][16] = { "Calc_Depth" }; pChannelParams->u8ThreadRunning |= (0x01 << mod); printf("Algo channel[%d] [%s]start ThreadRunning=0x%x\n", channel, str[mod],pChannelParams->u8ThreadRunning); if (mod >= TOF_MOD_MAX) { TOF_ERR("no this mod[%d]", mod); pthread_exit(NULL); return NULL; } //Add exit thread Loop!!!!!!! while (pChannelParams->bForceStop == 0) { std::unique_lock<std::mutex> lck(pChannelParams->mtx); if(RawFrameQ[channel].empty()) { pChannelParams->cv.wait_for(lck, std::chrono::seconds(FRAME_CAPTURE_TIME_OUT)); continue; } u32size = _CalcTofFrameSize(OutputPackId, pChannelParams); outtFrameInf.pPacketAddr = (void *)malloc(u32size); if (NULL == outtFrameInf.pPacketAddr) { TOF_INFO("outtFrameInf pPacketAddr is null!\n"); continue; } instFrameInf = (FrameInf_t)RawFrameQ[channel].front(); outtFrameInf.nPts = instFrameInf.nPts; outtFrameInf.nFrameNum = instFrameInf.nFrameNum; TOF_TIME("->[ch%d]%s frame %lld cost %f ms\n",channel ,str[mod], instFrameInf.nFrameNum, (float)(MI_OS_GetTime() - instFrameInf.nPts)/1000.0); if (E_SUCCESS != pChannelParams->algoCallback[mod](&instFrameInf, &outtFrameInf, &channel)) { free(outtFrameInf.pPacketAddr); outtFrameInf.pPacketAddr = NULL; } RawFrameQ[channel].pop(); } TOF_WRN("\n Algo channel[%d] [%s]exit\n", channel, str[mod]); pChannelParams->u8ThreadRunning &= (~(0x01 << mod)); pthread_exit(NULL); return E_SUCCESS; } void* Tof_Run(void *argv) { _GetSensorInfo(channel, tofCamerInfo); MI_SNR_SetFps(channel, 10); GetVifRawData(channel, VifRaw); ret = MI_Tof_PutRawIntoAlgo(channel, pOneFullFrame[idx], totalsz, VifRaw.stBufInfo.u64Pts); } int main(int argc, char **argv) { int ret = 0; MI_U8 i = 0; MI_U32 maxpacket[MAX_UVC_DEV_NUM] = {1024, 1024,192}; MI_U8 mult[MAX_UVC_DEV_NUM] = {1, 1, 0}, burst[MAX_UVC_DEV_NUM] = {0, 0, 0}; MI_U8 intf[2 * MAX_UVC_DEV_NUM] = {0}; MI_S32 mode = UVC_MEMORY_MMAP; MI_S32 trace_level = UVC_DBG_ERR;//UVC_DBG_TRACE; struct sigaction sigAction; sigAction.sa_handler = ST_HandleSig; sigemptyset(&sigAction.sa_mask); sigAction.sa_flags = 0; sigaction(SIGINT, &sigAction, NULL); MI_SNR_PAD_ID_e eSnrPad = E_MI_SNR_PAD_ID_NA; ST_DefaultArgs(&g_stConfig); #if TOF_SLAVE_MODE _tof_init_xvs(); #endif // Init UVC ST_UVC_SetTraceLevel(trace_level); ST_UvcInit(g_device_num, maxpacket, mult, burst, intf, mode); printf("----------uvc_tof--------\n"); for(i=1; i< argc; i++) { if(MI_SUCCESS != ST_ParserIni(argv[i], &eSnrPad)) { printf("parse init fail \n"); return 0; } strncpy(gSnrIni[eSnrPad], argv[i], ST_TOF_SNR_PATH_MAX); g_u8ChannelNum++; } /************************************************ Step1: init SYS *************************************************/ STCHECKRESULT(ST_Sys_Init()); //_TofCameraStart { MI_S32 s32Ret = 0; MI_S8 u8TaskName[64]; MI_U16 tof_width = 0; MI_U16 tof_height = 0; mPthread_Run_Status = 1; for(int i=0; i<ST_MAX_SENSOR_NUM; i++) { if(gSnrPad[i] != E_MI_SNR_PAD_ID_NA) { //_TOFCamera_Init(gSnrPad[i], tof_width, tof_height); { //sstar_init_snr(pstSensorAttr); { STCHECKRESULT(_TOFParseCalibration(eSnrPadId)); } sstar_init_vif(pstVifAttr, tof_width, tof_height); } //Tof_Init(gSnrPad[i]); { _GetSensorInfo(eSnrPad, g_tofCamerInfo) //MI_Tof_Init(eSnrPad, &tofInitParams); { tof_set_amplitude_frame_type(pChannelParams->handle, (tof_hdr_frame_type)pChannelParams->tofParams.AmplitudeType); { mi_tof_mod_thread_Arg Arg1,Arg2,Arg3; pthread_t threadID; Arg1.channel = channel; Arg1.mod = MI_TOF_CALC; sprintf((char *)threadname, "calc_depth#%1d", channel); TOF_WRN("start AlgorithmThread:%s-->%p\n",threadname,&Arg1); pthread_create(&threadID, NULL, AlgorithmThread, (void *)&Arg1); pthread_setname_np(threadID, (char *)threadname); pChannelParams->mRunAlgoThread[MI_TOF_CALC] = threadID; MySystemDelay(1); } pChannelParams->algoCallback[MI_TOF_CALC] = Calc_Depth; tof_processor_set_hdr_mix_gain(); } } } } _TofCalcDepthSize(tof_width, tof_height, g_tof_irSize, g_tof_depthSize, g_tof_pclSize, g_tof_frameHeaderSize); printf("valid channelNum=%d g_tof_irSize=%d\n", g_u8ChannelNum, g_tof_irSize); for(int i=0; i<ST_MAX_SENSOR_NUM; i++) { if(gSnrPad[i] != E_MI_SNR_PAD_ID_NA) { if(pthread_create(&Tof_Thread_Run[i], NULL, Tof_Run, &gSnrPad[i]) == 0) { memset((char*)u8TaskName, 0x00, sizeof(u8TaskName)); sprintf((char *)u8TaskName, "TofRun_%d",i); pthread_setname_np(Tof_Thread_Run[i] , (const char *)u8TaskName); } else { printf("%s tof run pthread_create failed\n", __func__); goto EXIT; } //use callback to get depth result MI_Tof_RegisterDepthCallBack(gSnrPad[i], Tof_GetDepth_Callback); g_u64lastTime[i] = MI_OS_GetTime(); } } } while(!g_bExit) { MI_U32 u32Select = 0xff; printf("select 0: set depth low/high \n"); printf("select 1: set debug params \n"); printf("select 2: set sensor filter\n"); printf("select 3: set sensor auto exposure\n"); printf("select 13: exit\n"); //printf("select 14: enable cus3a demo\n"); scanf("%d", &u32Select); ST_Flush(); if(u32Select == 0) { ST_TofSetDepthLowHigh(); } else if(u32Select == 13) { g_bExit = TRUE; } usleep(100*1000); } _TofCameraStop(); printf("!!!!!!!!!!!%s %d exit done\n",__FUNCTION__,__LINE__); EXIT: ST_UvcDeinit(); return ret; }
2. API Reference¶
| Functional Module API | API Name | Function |
|---|---|---|
| 1 | MI_Tof_Init | Initialize TOF Channel |
| 2 | MI_Tof_UnInit | Deinitialize TOF Channel |
| 3 | MI_Tof_RegisterCallBack | Register Mod function callback for TOF Channel |
| 4 | MI_Tof_UnRegisterCallBack | Unregister Mod function callback for TOF Channel |
| 5 | MI_Tof_PutRawIntoAlgo | Send a complete original TOF Channel Frame |
| 6 | MI_Tof_GetTofResult | Get INZI (brightness & depth) Frame |
| 7 | MI_Tof_ReleaseTofResult | Release previously obtained INZI Frame |
| 8 | MI_Tof_SetFilter | Dynamically enable/disable TOF iir/denoise filter. |
| 9 | MI_Tof_GetFilter | Get filter configuration information |
| 10 | MI_Tof_SetAutoExposure | Dynamically enable/disable TOF auto exposure. |
| 11 | MI_Tof_GetAutoExposure | Get AE switch status, configuration information, etc. |
| 12 | MI_Tof_SetDebugParams | Set TOF algorithm debug parameters |
| 13 | MI_Tof_SetAmplitudeFrameType | Dynamically control whether amplitude uses high/low gain data for calculation. Low gain is used by default. |
| 14 | MI_Tof_SetCalibrationType | Dynamically enable/disable calibration type. By default, all calibration types are enabled. Debug interface |
| 15 | MI_Tof_SetDebugLevel | Set MI_TOF debug level. Debug interface |
| 16 | MI_Tof_RegisterDepthCallBack | Register callback for "Get TOF depth". |
| 17 | MI_Tof_UnRegisterDepthCallBack | Unregister "Get TOF depth" callback. |
| 18 | MI_Tof_ParseEmbedInfo | Get information from the embed line |
| 19 | MI_Tof_EnableInterferenceDeteced | Enable "interference elimination during multi-device confrontation" function |
| 20 | MI_Tof_DisableInterferenceDeteced | Disable "interference elimination during multi-device confrontation" function |
| 21 | MI_Tof_SetFlip | Set different flip types |
| 22 | MI_Tof_SetIrThreshold | Set threshold, depth will output 0 if less than this threshold |
| 23 | MI_Tof_SetAeParam | Set AE parameters |
| 24 | MI_Tof_GetAeParam | Get AE parameters |
| 25 | MI_Tof_SetRotation | Set image rotation function |
2.1. MI_Tof_Init¶
-
Function
Initialize TOF Channel
-
Syntax
MI_S32 MI_Tof_Init(MI_U8 channel, MiTofParams_t* pInitParams);
-
Parameters
Parameter Name Description Input/Output Channel Channel can support 0~3, maximum 4 Sensor channels by default. The upper layer needs to properly map Sensor chmap/Port and channel. MI_TOF will not bind to specific HW configuration. Input pInitParams Initialization parameters, setting Sensor HW attributes, Cali/AE/Filter parameters corresponding to the channel Input -
Return Value
-
E_SUCCESS: Successfully initialized TOF Channel. If reinitialized after previous success, also returns E_SUCCESS.
-
-1: Initialization failed, insufficient resources or parameter error.
-
-
Dependencies
- Header files: PacketModule.h, mid_sys.h, mi_sys_datatype.h, tof_algorithm.h, TofChannelFrame.h
-
Note
Maximum 4 channels supported. Initialization will fail if system resources are insufficient.
Reference for AE parameter settings:
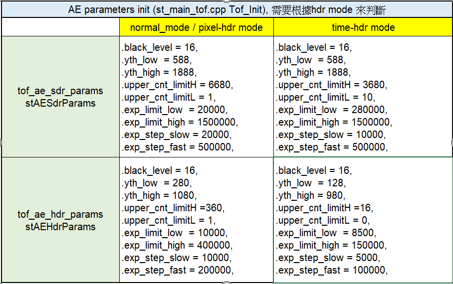
Figure 2‑1:AE Param Setting -
Example
MiTofParams_t tofInitParams; MiTofSensorHwParams_t TofHwParams; MixerRawBufInfo_t VifRaw; MiTofInterferenceDetecedParams_t pDectectdParams; memset(&VifRaw, 0x0, sizeof(MixerRawBufInfo_t)); //Get Sensor Device infor tof_sensor_information tofCamerInfo; memset(&tofCamerInfo, 0, sizeof(tofCamerInfo)); memset(&tofInitParams, 0, sizeof(MiTofParams_t)); if (0 == MI_SNR_CustFunction(E_MI_SNR_PAD_ID_1, CMDID_GET_DEVICE_INFO, sizeof(tofCamerInfo), &tofCamerInfo, E_MI_SNR_CUSTDATA_TO_USER)) { //setting TOF HW Sensor Params TofHwParams.width = tofCamerInfo.width; TofHwParams.height = tofCamerInfo.height; TofHwParams.pixel_size = tofCamerInfo.pixel_size; TofHwParams.raw_format = tofCamerInfo.raw_format; TofHwParams.hdr_type = tofCamerInfo.hdr_type; TofHwParams.dualFreq = tofCamerInfo.de_aliasing; TofHwParams.mod_freq1 = tofCamerInfo.mod_freq1; TofHwParams.mod_freq2 = tofCamerInfo.mod_freq2; TofHwParams.chip_id = tofCamerInfo.chip_id; TofHwParams.one_quad_one_footer = tofCamerInfo.one_quad_one_footer; tofInitParams.SensorHwParams = TofHwParams; tofInitParams.AmplitudeType = MI_TOF_HDR_FRAME_MIX; { if(tofCamerInfo.dll_sw_calib_capability) { tofInitParams.mDllFilterParams.SetDllClibSwConfig = _tof_SetDllClibSwConfig; tofInitParams.mDllFilterParams.filter_gain = 8; } //[SDR] tof_ae_sdr_params stAESdrParams = { .black_level = 16, .yth_low = 588, .yth_high = 1888, .upper_cnt_limitH = 6680, .upper_cnt_limitL = 1, .exp_limit_low = 20000, .exp_limit_high = 1500000, .exp_step_slow = 20000, .exp_step_fast = 500000, }; //[HDR] tof_ae_hdr_params stAEHdrParams = { .black_level = 16, .yth_low = 280, .yth_high = 1080, .upper_cnt_limitH = 360, .upper_cnt_limitL = 1, .exp_limit_low = 10000, .exp_limit_high = 400000, .exp_step_slow = 10000, .exp_step_fast = 200000, }; tofInitParams.AEParams.sdrParams = stAESdrParams; tofInitParams.AEParams.hdrParams = stAEHdrParams; tofInitParams.AEParams.GetAETimeNs = _tof_GetIntegratimTime; tofInitParams.AEParams.SetAETimeNs = _tof_SetIntegratimTime; tofInitParams.AEParams.AutoExposure = true; } //Fill filter Params { tof_iir_params iir_params;// = pTofChannelParams[channel]->tofParams.FilterParams.iirParams; tof_denoise_params denoise_params;// = pTofChannelParams[channel]->tofParams.FilterParams.denoiseParams; iir_params.gain = 128; denoise_params.mode = 1; denoise_params.lpf_th = 52; denoise_params.flypix_threshold = 1000; tofInitParams.FilterParams.iirParams = iir_params; tofInitParams.FilterParams.denoiseParams = denoise_params; tofInitParams.FilterParams.iirEnable = true; tofInitParams.FilterParams.denoiseEnable = true; if(TofHwParams.mod_freq2 != 0) { MiTofDealiaseFlyPixelParams_t dealiaseFPParams; dealiaseFPParams.low_threshold = 800; dealiaseFPParams.high_threshold = 3200; tofInitParams.FilterParams.dealiaseFlyPixelParams = dealiaseFPParams; tofInitParams.FilterParams.dealiaseFlyPixelEnable = true; } g_tofSetFilter |= ((tofInitParams.FilterParams.iirEnable)?MI_TOF_FILTER_IIR:0); if(tofInitParams.FilterParams.denoiseEnable) { switch(denoise_params.mode) { case 1: g_tofSetFilter |= MI_TOF_FILTER_DENOISE; break; case 2: g_tofSetFilter |= MI_TOF_FILTER_FLYING_PIXEL; break; default: break; } } g_tofSetFilter |= ((tofInitParams.FilterParams.dealiaseFlyPixelEnable)?MI_TOF_FILTER_DEALIASE_FLYPIXEL:0); g_tofSetFilter_pre = g_tofSetFilter; } // Fill Calib Params { char *binpath = (char *)"calibration.bin"; jmcam_persistence_util_block_device_header block_device_header; char *block_image = NULL; struct stat buf; FILE *p = NULL; int result; result = stat("./calibration.bin", &buf); if (result != 0) { printf("error: Failed ^_^ \n"); } else { printf(" size of the file in bytes: %d !\n",buf.st_size); } block_image = (char *)malloc(buf.st_size); if(block_image == NULL) { printf("@@@@@@@@@@@@Malloc block image fail\n"); return -1; } p = fopen("./calibration.bin", "rb"); fread(block_image, sizeof (char), buf.st_size, p); fclose(p); tofInitParams.mCaliParams.caliImage = block_image; tofInitParams.mCaliParams.caliImageSZ = (buf.st_size); tofInitParams.mCaliParams.CaliParams.calibartion = NULL; tofInitParams.mCaliParams.temperatureParams.sensor = 36; tofInitParams.mCaliParams.temperatureParams.illumination = 38; } tofInitParams.PclNeed = true; } tofInitParams.GetConfigID = _tof_GetConfigID; tofInitParams.SetConfigID = _tof_SetConfigID; pDectectdParams.SensorRestart = _tof_sensor_restart; MI_Tof_Init(MI_TOF_DEFAULT_CH, &tofInitParams); MI_Tof_EnableInterferenceDeteced(gSnrPad, &pDectectdParams);
2.2. MI_Tof_UnInit¶
-
Function
Deinitialize TOF Channel, release related Thread and Frame buffer
-
Syntax
MI_S32 MI_Tof_UnInit(MI_U8 channel);
-
Parameters
Parameter Name Description Input/Output Channel TOF Channel to be deinitialized, corresponding to Init Input -
Return Value
-
E_SUCCESS or 0: Successfully deinitialized TOF Channel.
-
-1: Deinitialization failed
-
-
Dependencies
- Header files: PacketModule.h, mid_sys.h, mi_sys_datatype.h, tof_algorithm.h, TofChannelFrame.h
2.3. MI_Tof_RegisterCallBack¶
-
Function
Register Mod function callback for TOF Channel
-
Syntax
MI_S32 MI_Tof_RegisterCallBack(MI_U8 channel, MI_U32 Mod, MI_S32 (*Callback)(void* inputData, void* outputData, void* config));
-
Parameters
Parameter Name Description Input/Output Channel Channel ID Input Mod Three enumerations defined in mi_tof_mod Input Callback Function callback registered for each Mod Input -
Return Value
-
E_SUCCESS or 0: Successfully registered callback function.
-
-1: Registration failed
-
-
Dependencies
- Header files: PacketModule.h, mid_sys.h, mi_sys_datatype.h, tof_algorithm.h, TofChannelFrame.h
2.4. MI_Tof_UnRegisterCallBack¶
-
Function
Unregister Mod function callback for TOF Channel
-
Syntax
MI_S32 MI_Tof_UnRegisterCallBack(MI_U8 channel, MI_U32 Mod);
-
Parameters
Parameter Name Description Input/Output Channel Channel ID Input Mod Three enumerations defined in mi_tof_mod Input -
Return Value
-
E_SUCCESS or 0: Successfully unregistered callback function.
-
-1: Unregistration failed
-
-
Dependencies
- Header files: PacketModule.h, mid_sys.h, mi_sys_datatype.h, tof_algorithm.h, TofChannelFrame.h
2.5. MI_Tof_PutRawIntoAlgo¶
-
Function
Send a complete original TOF Frame to the corresponding TOF Channel
-
Syntax
MI_S32 MI_Tof_PutRawIntoAlgo(MI_U8 channel, char* pbuffer, MI_U32 size, MI_U64 nPts_in);
-
Parameters
Parameter Name Description Input/Output Channel Channel ID Input pbuffer Complete TOF original Frame data Buffer Input size Buffer size Input nPts_in pts of Raw data Input -
Return Value
-
E_SUCCESS or 0: Successfully sent to frame buffer.
-
-1: Sending failed, possibly because the channel was not created or the sent size does not match the size of TOF calculation raw data.
-
-
Dependencies
- Header files: PacketModule.h, mid_sys.h, mi_sys_datatype.h, tof_algorithm.h, TofChannelFrame.h
-
Example
char* pOneFullFrame = (char*)malloc(totalsz); memset(pOneFullFrame, 0, totalsz); while (mPthread_Run_Status) { //1.get vif date if (MI_SUCCESS == GetVifRawData(VifRaw)) { if (TofHwParams.dualFreq == 1) { if (_waitTofDualFreqOneFrameReady((char*)VifRaw.stBufInfo.stFrameData.pVirAddr[0], pOneFullFrame, &TofHwParams)) { **MI_Tof_PutRawIntoAlgo**(MI_TOF_DEFAULT_CH, pOneFullFrame, totalsz, VifRaw.stBufInfo.u64Pts); } } else { //2.to algo **MI_Tof_PutRawIntoAlgo**(MI_TOF_DEFAULT_CH, (char*)VifRaw.stBufInfo.stFrameData.pVirAddr[0], VifRaw.stBufInfo.stFrameData.u32BufSize, VifRaw.stBufInfo.u64Pts); } ReleaseOneRaw(VifRaw.hHandle); } }
2.6. MI_Tof_GetTofResult¶
-
Function
Get INZI (brightness & depth) frame.
-
Syntax
MI_S32 MI_Tof_GetTofResult(MI_U8 channel, mi_tof_INZI_data &depth);
-
Parameters
Parameter Name Description Input/Output Channel Channel ID Input depth INZI brightness/depth data Output -
Return Value
-
E_SUCCESS or 0: Successfully obtained INZI Frame.
-
-1: Obtaining failed, possibly because the current frame buffer is empty or the channel was created.
-
-
Dependencies
- Header files: PacketModule.h, mid_sys.h, mi_sys_datatype.h, tof_algorithm.h, TofChannelFrame.h
-
Note
There are two methods to get INZI data. Note that the new version of SDK only retains method 2:
-
Method 1: MI_Tof_GetTofResult/MI_Tof_ReleaseTofResult;
-
Method 2: MI_Tof_RegisterDepthCallBack/MI_Tof_UnRegisterDepthCallBack;
-
2.7. MI_Tof_ReleaseTofResult¶
-
Function
Release INZI (brightness & depth) Frame
-
Syntax
MI_S32 MI_Tof_ReleaseTofResult(MI_U8 channel, mi_tof_INZI_data &depth);
-
Parameters
Parameter Name Description Input/Output Channel Channel ID Input depth INZI brightness/depth data Input -
Return Value
-
E_SUCCESS or 0: Successfully released INZI Frame.
-
-1: Release failed.
-
-
Dependencies
- Header files: PacketModule.h, mid_sys.h, mi_sys_datatype.h, tof_algorithm.h, TofChannelFrame.h
-
Example
mi_tof_INZI_data depth; while (mPthread_Run_Status) { //3.get if (E_SUCCESS == **MI_Tof_GetTofResult**(MI_TOF_DEFAULT_CH, depth)) { //send to disp { //to do… } MI_Tof_ReleaseTofResult(MI_TOF_DEFAULT_CH, depth); } }
2.8. MI_Tof_SetFilter¶
-
Function
Dynamically enable/disable tof algorithm iir/denoise filter/flying pixel filter/dealise flying pixel filter.
-
Syntax
MI_S32 MI_Tof_SetFilter(MI_U8 channel, mi_tof_filter type, void* param);
-
Parameters
Parameter Name Description Input/Output Channel Channel ID Input type Different filter types defined by mi_tof_filter Input params Different data structure definitions are passed in according to different filter types:MI_TOF_FILTER_IIR corresponds to MiTofFilterIirParam_t,MI_TOF_FILTER_DENOISE corresponds to MiTofFilterDenoiseParam_t,MI_TOF_FILTER_FLYING_PIXEL corresponds to MiTofFilterFlyPixelParam_t,MI_TOF_FILTER_DEALIASE_FLYPIXEL corresponds to MiTofDealiaseFlyPixelParams_t Input -
Return Value
-
E_SUCCESS or 0: Success.
-
-1: Failure
-
-
Dependencies
- Header files: PacketModule.h, mid_sys.h, mi_sys_datatype.h, tof_algorithm.h, TofChannelFrame.h
-
Example
//case1:Enable iir filter MiTofFilterIirParam_t iirParams; iirParams.enable = (cus_param->filterParam.iir.enable==0)?false:true; iirParams.gain = cus_param->filterParam.iir.gain; MI_Tof_SetFilter(channel, MI_TOF_FILTER_IIR, (void*)&iirParams); //case2:Enable denoise filter MiTofFilterDenoiseParam_t denoiseParams; denoiseParams.enable = (cus_param->filterParam.denoise.enable==0)?false:true; denoiseParams.lpf_th = cus_param->filterParam.denoise.lpf_th; denoiseParams.flypix_threshold = cus_param->filterParam.denoise.flypix_threshold; MI_Tof_SetFilter(channel, MI_TOF_FILTER_DENOISE, (void*)&denoiseParams);
2.9. MI_Tof_GetFilter¶
-
Function
Get the status of tof algorithm iir/denoise filter/flying pixel filter/dealise flying pixel filter
-
Syntax
MI_S32 MI_Tof_GetFilter(MI_U8 channel, mi_tof_filter type, void* param);
-
Parameters
Parameter Name Description Input/Output Channel Channel ID Input type Different filter types defined by mi_tof_filter Input params Different data structure definitions are passed in according to different filter types:MI_TOF_FILTER_IIR corresponds to MiTofFilterIirParam_t,MI_TOF_FILTER_DENOISE corresponds to MiTofFilterDenoiseParam_t,MI_TOF_FILTER_FLYING_PIXEL corresponds to MiTofFilterFlyPixelParam_t,MI_TOF_FILTER_DEALIASE_FLYPIXEL corresponds to MiTofDealiaseFlyPixelParams_t Input -
Return Value
-
E_SUCCESS or 0: Success.
-
-1: Failure
-
2.10. MI_Tof_SetAutoExposure¶
-
Function
Dynamically enable/disable auto exposure
-
Syntax
MI_S32 MI_Tof_SetAutoExposure(MI_U8 channel, bool enable);
-
Parameters
Parameter Name Description Input/Output Channel Channel ID Input enable 1: Enable AE; 0: Disable AE Input -
Return Value
-
E_SUCCESS or 0: Success.
-
-1: Failure
-
2.11. MI_Tof_GetAutoExposure¶
-
Function
Dynamically enable/disable auto exposure
-
Syntax
MI_S32 MI_Tof_GetAutoExposure(MI_U8 channel, bool *enable);
-
Parameters
Parameter Name Description Input/Output Channel Channel ID Input enable 1: AE enabled; 0: AE disabled Output -
Return Value
-
E_SUCCESS or 0: Success.
-
-1: Failure
-
2.12. MI_Tof_SetDebugParams¶
-
Function
Set algorithm debug parameters
-
Syntax
MI_S32 MI_Tof_SetDebugParams(MI_U8 channel, int* pDebugParams);
-
Parameters
Parameter Name Description Input/Output Channel Channel ID Input pDebugParams pDebugParams[0]: Set debug level:0 – Turn off log printing1 – Algorithm uses golden raw data2 – Set algorithm debug level to INFO4 – Set algorithm debug level to ERRORpDebugParams[1][2]: Coordinates (x,y) of a point in the image for save data function. (-1,-1) means full image; (-1, x) (x>0) means column x; (x,-1) (x>0) means row x; (x>0, y>0) means a specific point.pDebugParams[3]: Frame number for save datapDebugParams[4]: Which stage of data to save. BIT[1] == 1 means save RAW data; BIT[6] == 1 means dump depth data (binary); BIT[7] == 1 means dump PCL (txt).Example: save pcl data:tofdebug 0 -1 -1 1 192 Input -
Return Value
-
E_SUCCESS or 0: Successfully obtained INZI Frame.
-
-1: Obtaining failed, possibly because the current frame buffer is empty or the channel was created.
-
2.13. MI_Tof_SetAmplitudeFrameType¶
-
Function
Dynamically control whether amplitude uses high/low gain data for calculation. Low gain is used by default.
-
Syntax
MI_S32 MI_Tof_SetAmplitudeFrameType(MI_U8 channel, mi_tof_hdr_frame_type params);
-
Parameters
Parameter Name Description Input/Output Channel Channel ID Input params Hdr frame type. Refer to mi_tof_hdr_frame_type Input -
Return Value
-
E_SUCCESS or 0: Success.
-
-1: Failure
-
2.14. MI_Tof_SetCalibrationType¶
-
Function
Dynamically enable/disable calibration type. By default, all calibration types are enabled. Debug interface.
-
Syntax
MI_S32 MI_Tof_SetCalibrationType(MI_U8 channel, uint32_t calib_type);
-
Parameters
Parameter Name Description Input/Output Channel Channel ID Input calib_type 0: Do not perform phase calibration.BIT[1]=1: Perform wiggling calibration;BIT[2]=1: Perform FPPN calibration;BIT[3]=1: Perform temperature calibration; Input -
Return Value
-
E_SUCCESS or 0: Success.
-
-1: Failure
-
-
Example
//case1 Enable wiggling、fppn、temperature calibration MI_SNR_PAD_ID_e eSnrPad = gSnrPad; MI_U32 calib_type = 7; MI_Tof_SetCalibrationType(eSnrPad, calib_type); //Enable DLL calibration MI_SNR_PAD_ID_e eSnrPad = gSnrPad; MI_U32 calib_type = 7 | (1<<4); //1<<4: Dll calibration MI_Tof_SetCalibrationType(eSnrPad, calib_type);
2.15. MI_Tof_SetDebugLevel¶
-
Function
Set MI_TOF debug level. Debug interface.
-
Syntax
MI_S32 MI_Tof_SetDebugLevel(TofDebugLevel level, MI_U32 flag);
-
Parameters
Parameter Name Description Input/Output TofDebugLevel Debug level.typedef enum Input Flag Set the time printing switch for algorithm threads.0: Do not print.BIT[0]=1: Print time for calculating phase and amplitude;BIT[1]=1: Print time for calibration;BIT[2]=1: Print time for filter, depth, and point cloud; Input -
Return Value
-
E_SUCCESS or 0: Success.
-
-1: Failure
-
2.16. MI_Tof_RegisterDepthCallBack¶
-
Function
Register callback for "Get TOF depth".
-
Syntax
MI_S32 MI_Tof_RegisterDepthCallBack(MI_U8 channel, MI_S32 (*Callback)(MI_U8 channel, mi_tof_INZI_data &depth));
-
Parameters
Parameter Name Description Input/Output channel Channel ID Input Depth Registration function callback for INZI brightness/depth data Input -
Return Value
-
E_SUCCESS or 0: Success.
-
-1: Failure
-
-
Dependencies
- Header files: PacketModule.h, mid_sys.h, mi_sys_datatype.h, tof_algorithm.h, TofChannelFrame.h
-
Note
There are two methods to get INZI data:
-
Method 1: MI_Tof_GetTofResult/MI_Tof_ReleaseTofResult;
-
Method 2: MI_Tof_RegisterDepthCallBack/MI_Tof_UnRegisterDepthCallBack;
-
2.17. MI_Tof_UnRegisterDepthCallBack¶
-
Function
Unregister callback for "Get TOF depth".
-
Syntax
MI_S32 MI_Tof_UnRegisterDepthCallBack(MI_U8 channel);
-
Parameters
Parameter Name Description Input/Output channel Channel ID Input -
Return Value
-
E_SUCCESS or 0: Success.
-
-1: Failure
-
-
Note
There are two methods to get INZI data. The new SDK mainly supports method 2:
-
Method 1: MI_Tof_GetTofResult/MI_Tof_ReleaseTofResult;
-
Method 2: MI_Tof_RegisterDepthCallBack/MI_Tof_UnRegisterDepthCallBack;
-
2.18. MI_Tof_ParseEmbedInfo¶
-
Function
Get information from the embed line.
-
Syntax
MI_S32 MI_Tof_ParseEmbedInfo(MI_U8 channel, char* embed, MiTofEmbedInfo* info);
-
Parameters
Parameter Name Description Input/Output Channel Channel ID Input embed Start address of footer buffer Input info Footer information, such as frame number, quad number, etc. Output -
Return Value
-
E_SUCCESS or 0: Success.
-
-1: Failure
-
-
Dependencies
- Header files: mi_parse_embed.h
2.19. MI_Tof_EnableInterferenceDeteced¶
-
Function
Enable "interference elimination during multi-device confrontation" function.
-
Syntax
MI_S32 MI_Tof_EnableInterferenceDeteced(MI_U8 channel, MiTofInterferenceDetecedParams_t* pDectectdParams);
-
Parameters
Parameter Name Description Input/Output Channel Channel ID Input pDectectdParams Input detection parameters, refer to struct MiTofInterferenceDetecedParams_t. Input -
Return Value
-
E_SUCCESS or 0: Success.
-
-1: Failure
-
-
Dependencies
- Header files: mid_sys.h, mi_sys_datatype.h, tof_algorithm.h
2.20. MI_Tof_DisableInterferenceDeteced¶
-
Function
Disable "interference elimination during multi-device confrontation" function.
-
Syntax
MI_S32 MI_Tof_DisableInterferenceDeteced(MI_U8 channel);
-
Parameters
Parameter Name Description Input/Output Channel Channel ID Input -
Return Value
-
E_SUCCESS or 0: Success.
-
-1: Failure
-
-
Dependencies
- Header files: tof_algorithm.h
2.21. MI_Tof_SetFlip¶
-
Function
Set different flip types.
-
Syntax
MI_S32 MI_Tof_SetFlip(MI_U8 channel, mi_tof_flip_type type);
-
Parameters
Parameter Name Description Input/Output Channel Channel ID Input Type Flip type Input -
Return Value
-
E_SUCCESS or 0: Success.
-
-1: Failure
-
2.22. MI_Tof_SetIrThreshold¶
-
Function
Set amplitude threshold. Pixels with values less than this will output depth 0.
-
Syntax
MI_S32 MI_Tof_SetIrThreshold(MI_U8 channel, MI_U32 value);
-
Parameters
Parameter Name Description Input/Output Channel Channel ID Input value Brightness value (0 to 4095) Input -
Return Value
-
E_SUCCESS or 0: Success.
-
-1: Failure
-
2.23. MI_Tof_SetAeParam¶
-
Function
Set AE parameters.
-
Syntax
MI_S32 MI_Tof_SetAeParam(MI_U8 channel, MiTofAeSdrParam_t* sdr, MiTofAeHdrParam_t* hdr);
-
Parameters
Parameter Name Description Input/Output Channel Channel ID Input sdr AE parameter configuration for SDR Input hdr AE parameter configuration for HDR Input -
Return Value
-
E_SUCCESS or 0: Success.
-
-1: Failure
-
2.24. MI_Tof_GetAeParam¶
-
Function
Get AE parameters.
-
Syntax
MI_S32 MI_Tof_GetAeParam(MI_U8 channel, MiTofAeSdrParam_t* sdr, MiTofAeHdrParam_t* hdr);
-
Parameters
Parameter Name Description Input/Output Channel Channel ID Input sdr AE parameter configuration for SDR Output hdr AE parameter configuration for HDR Output -
Return Value
-
E_SUCCESS or 0: Success.
-
-1: Failure
-
2.25. MI_Tof_SetRotation¶
-
Function
Set rotation type.
-
Syntax
MI_S32 MI_Tof_SetRotation(MI_U8 channel, mi_tof_rotation_type type);
-
Parameters
Parameter Name Description Input/Output Channel Channel ID Input Type Rotation type Input -
Return Value
-
E_SUCCESS or 0: Success.
-
-1: Failure
-
3. Application Case API Usage Flow¶
3.1 Method 1¶
MiTofParams_t tofInitParams;
MiTofSensorHwParams_t TofHwParams;
//1.set tofInitParams
MI_Tof_Init(MI_TOF_DEFAULT_CH, &tofInitParams);
while (1)
{
//2.Get vif raw data
//3.put raw to MI Tof algo
MI_Tof_PutRawIntoAlgo(MI_TOF_DEFAULT_CH, rawbuf, rawsize);
//4.get depth data
if (E_SUCCESS == **MI_Tof_GetTofResult**(MI_TOF_DEFAULT_CH, depth))
{
//5.depth data to do next
//6.release depth buf
MI_Tof_ReleaseTofResult(MI_TOF_DEFAULT_CH, depth);
}
}
3.2 Method 2¶
MI_S32 Tof_GetDepth_Callback(MI_U8 channel, mi_tof_INZI_data &depth)
{
……
}
int main(int argc, char **argv)
{
MiTofParams_t tofInitParams;
MiTofSensorHwParams_t TofHwParams;
//1.set tofInitParams
MI_Tof_Init(MI_TOF_DEFAULT_CH, &tofInitParams);
//use callback to get depth result
MI_Tof_RegisterDepthCallBack(MI_TOF_DEFAULT_CH, Tof_GetDepth_Callback);
……
MI_Tof_UnRegisterDepthCallBack(MI_TOF_DEFAULT_CH);
}
Explanation:
- The above process is the most basic usage flow of MI Tof algorithm. For specific implementation details, please refer to mixer or tof demo.
- Step 3 (putting raw data into the algorithm) and step 4 (getting depth data) can be performed in different threads, which allows algorithm processing of multiple raw data simultaneously to improve efficiency.
4. TOF Data Types¶
| Data Type Definition | Data Type | Definition |
|---|---|---|
| 1 | mi_tof_mod | Define TOF calculation steps (Calc/Cali/Filter) |
| 2 | mi_tof_INZI_data | Define TOF calculated Frame type |
| 3 | MiTofSensorHwParams_t | Define Sensor HW description, converted from Sensor Driver |
| 4 | MiTofCaliParams_t | Define Calibration parameters |
| 5 | MiTofFilterParams_t | Define Filter parameters |
| 6 | MiTofAEParams_t | Define AE auto-exposure parameters and function callbacks |
| 7 | MiTofParams_t | Define TOF Channel initialization parameters |
| 8 | mi_tof_filter | Define filter types |
| 9 | tof_pixel_size | Define the size of each data unit in the RAW data output by the sensor, in bits |
| 10 | tof_raw_format | Define the Raw data format output by the sensor |
| 11 | tof_sensor_hdr_type | Define HDR type |
| 12 | tof_iir_params | Define iir filter structure |
| 13 | tof_denoise_params | Define denoise filter structure |
| 14 | tof_ae_sdr_params | Define auto-exposure parameters under SDR |
| 15 | tof_ae_hdr_params | Define auto-exposure parameters under HDR |
| 16 | mi_tof_hdr_frame_type | Define the method of using high gain or low gain to calculate amplitude |
| 17 | MiTofEmbedInfo | Define publicly available footer information |
| 18 | MiTofInterferenceDetecedParams_t | Define parameters required for enabling "interference elimination during multi-device confrontation" function |
| 19 | MiTofDllFilterParams_t | Define Dll calibration software config params. |
| 20 | MiTofDllFitlerCode_t | Define Dll calibration software config callback params. |
| 21 | MiTofDealiaseFlyPixelParams_t | Define parameters required for enabling flying pixel filter under dual frequency. |
4.1. mi_tof_mod¶
-
Description
Define TOF calculation stages
-
Definition
typedef enum { MI_TOF_CALC = 0, MI_TOF_CALI, MI_TOF_FILTER, TOF_MOD_MAX, }mi_tof_mod; -
Members
Member Description MI_TOF_CALC Phase calculation MI_TOF_CALI Phase calibration MI_TOF_FILTER Filter optimization for phase
4.2. mi_tof_INZI_data¶
-
Description
Define TOF calculated Frame type, refer to 2.8.1. V4L2_PIX_FMT_INZI ('INZI') — The Linux Kernel documentation
-
Definition
#pragma pack (4) typedef struct { MI_U64 pts; MI_U32 frameNum; MI_U16* ir; // 1 uint16_t per IR pixel float* depth; // 1 float per depth pixel float* pcl; // 3 float per depth pixel MI_U16* depthInt; // 1 int per depth pixel MI_S16* pclInt; // 3 int per depth pixel MI_U16 width; MI_U16 height; MI_U8* frameHeader;// 1Line Byte with frame info:depth_frame_header_info }mi_tof_INZI_data; #pragma pack () -
Members
Member Description pts Current frame timestamp frameNum Current frame sequence (reserved) Ir Brightness amplitude value (0~4096) depth Floating-point depth Z-axis distance pcl Floating-point point cloud data depthInt Integer depth Z-axis distance pclInt Integer point cloud data width Resolution width height Resolution height frameHeader Pointer to one buffer with integration-time and temperature, the buffer size is "width" Bytes -
Note
Floating-point and integer depth/pcl data cannot be obtained simultaneously. Floating-point is obtained by default.Integer data can be obtained by enabling the DepthIntNeed parameter in MI_Tof_Init.
4.3. MiTofSensorHwParams_t¶
-
Description
Sensor HW description or HW parameters
-
Definition
typedef struct _MiTofRawBufInfo_t { uint16_t width; uint16_t height; tof_pixel_size pixel_size; tof_raw_format raw_format; tof_sensor_hdr_type hdr_type; bool dualFreq; uint16_t chip_id; uint8_t one_quad_one_footer; uint32_t mod_freq1; uint32_t mod_freq2; uint8_t ir_type; uint8_t vcsel_type; }MiTofSensorHwParams_t; -
Members
Member Description width Sensor resolution width height Sensor resolution height pixel_size Number of bits per pixel. raw_format Raw data format output by Sensor. hdr_type HDR type:0: Normal mode.1: Pixel HDR mode.2: Time HDR mode dualFreq Whether dual frequency is supported. Supporting dual frequency extends the test distance. chip_id CHIP ID one_quad_one_footer Whether the script has 1 quad with 1 footer mod_freq1 High frequency mod_freq2 Low frequency ir_type IR type vcsel_type VCSEL type, currently supports 3011 and JM2519 -
Note
These should be obtained through the Sensor User API:MI_SNR_CustFunction(E_MI_SNR_PAD_ID_1, CMDID_GET_DEVICE_INFO, sizeof(tofCamerInfo), &tofCamerInfo, E_MI_SNR_CUSTDATA_TO_USER)
4.4. MiTofCaliParams_t¶
-
Description
TOF Calibration parameters
-
Definition
typedef struct _MiTofCaliParams { char* caliImage; MI_U32 caliImageSZ; }MiTofCaliParams_t; -
Members
Member Description caliImage Calibration Image buffer address caliImageSZ Calibration Image size -
Note
caliImage does not need to be released; MI_Tof_Uninit will release it.
4.5. MiTofFilterParams_t¶
-
Description
Filter parameters
-
Definition
typedef struct _MiTofFilterParams { MiTofFilterIirParam_t iirParams; MiTofFilterDenoiseParam_t denoiseParams; MiTofFilterFlyPixelParam_t flyPixelParams; MiTofDealiaseFlyPixelParams_t dealiaseFlyPixelParams; }MiTofFilterParams_t; -
Members
Member Description iirParams IIR Filter parameters. denoiseParams Denoise filter parameters. dealiaseFlyPixelParams Flying pixel filter parameters under dual frequency, refer to MiTofDealiaseFlyPixelParams_t. flyPixelParams Fly pixel filter parameters
4.6. MiTofAEParams_t¶
-
Description
Auto-exposure parameters
-
Definition
typedef struct _MiTofAEParams { tof_ae_sdr_params sdrParams; tof_ae_hdr_params hdrParams; MI_S32 (*GetAETimeNs)(MI_U8 channel, MiTofIntergrationTime_t* stInttime); MI_S32 (*SetAETimeNs)(MI_U8 channel, MiTofIntergrationTime_t* stInttime); bool AutoExposure; }MiTofAEParams_t; -
Members
Member Description sdrParams SDR exposure strategy parameters. hdrParams HDR exposure strategy parameters. GetAETimeNs Callback function to get current Sensor exposure time SetAETimeNs Callback function to set Sensor exposure time AutoExposure Enable auto-exposure
4.7. MiTofParams_t¶
-
Description
TOF Channel initialization parameters
-
Definition
typedef struct _MiTofParams { MiTofSensorHwParams_t SensorHwParams; MiTofCaliParams_t mCaliParams; MiTofAEParams_t AEParams; MiTofFilterParams_t FilterParams; bool PclNeed; bool DepthIntNeed; mi_tof_hdr_frame_type AmplitudeType; MI_S32 (*GetConfigID)(MI_U8 channel, uint16_t* config_id_value); MI_S32 (*SetConfigID)(MI_U8 channel, uint16_t config_id_value); uint16_t amplitude_threshold; MiTofDllFilterParams_t mDllFilterParams; uint8_t amplitude_gain; //gamma curve 10==linear, setting range value 1-30, default 6, 0 = no fusion uint8_t amplitudeU8Need; //0: amplitude value u16; 1 : amplitude value u8 }MiTofParams_t; -
Members
Member Description SensorHwParams Sensor hardware configuration parameters mCaliParams Calibration calculation parameters AEParams Auto-exposure parameters FilterParams Filter parameters PclNeed Enable point cloud algorithm DepthIntNeed Enable getting int depth AmplitudeType Configure amplitude type. The buffer size for externally provided amplitude will be allocated at this stage. GetConfigID Get config ID from sensor driver, generally used with SetConfigID to check if frame has been updated SetConfigID Similar to above amplitude_threshold Set amplitude threshold. Pixels below this threshold are invalid. mDllFilterParams Set Dll calibration filter parameters, such as gain. The smaller the setting, the more stable the phase; the larger the setting, the greater the weight of the current frame's dll code, and the faster the tracking speed when the measured phase changes drastically. See 4.19 for details. amplitude_gain IR image output effect control parameter:gamma curve 10==linear, setting range value 1-30, default 6, 0 = no fusion amplitudeU8Need Control whether IR outputs as U8, default is U16
4.8. mi_tof_filter¶
-
Description
Define TOF filter types
-
Definition
typedef enum { MI_TOF_FILTER_NONE = 0, MI_TOF_FILTER_IIR = 1 << 0, MI_TOF_FILTER_DENOISE = 1 << 1, MI_TOF_FILTER_FLYING_PIXEL = 1 << 2, MI_TOF_FILTER_DEALIASE_FLYPIXEL = 1 << 3, }mi_tof_filter; -
Members
Member Description MI_TOF_FILTER_NONE No tof filter MI_TOF_FILTER_IIR Tof iir filter. MI_TOF_FILTER_DENOISE Tof denoise filter (mode = 1), only different from "MI_TOF_FILTER_FLYING_PIXEL" in mode, only one can be selected. MI_TOF_FILTER_FLYING_PIXEL Flying pixel filter (mode = 2). MI_TOF_FILTER_DEALIASE_FLYPIXEL Flying pixel filter can be enabled under dual frequency
4.9. tof_pixel_size¶
-
Description
Define the size of each data unit in the RAW data output by the sensor, in bits.
-
Definition
typedef enum { TOF_PIXEL_SIZE_RAW12 = 12, TOF_PIXEL_SIZE_RAW16 = 16, TOF_PIXEL_SIZE_MAX = 0xFFFF, }tof_pixel_size; -
Members
Member Description TOF_PIXEL_SIZE_RAW12 Each data is 12 bits.If the Raw data format is one of the following, 1 pixel is 1 data, so 1 pixel is 12 bits:TOF_RAW_FORMAT_A_PLUS_BTOF_RAW_FORMAT_A_MINUS_B TOF_PIXEL_SIZE_RAW16 Each data is 16 bits.If the Raw data format is one of the following, 1 pixel is 1 data, so 1 pixel is 16 bits:TOF_RAW_FORMAT_A_PLUS_BTOF_RAW_FORMAT_A_MINUS_B
4.10. tof_raw_format¶
-
Description
Define the Raw data format output by the sensor
-
Definition
typedef enum { TOF_RAW_FORMAT_A_PLUS_B, TOF_RAW_FORMAT_A_MINUS_B, TOF_RAW_FORMAT_NUM, }tof_raw_format; -
Members
Member Description TOF_RAW_FORMAT_A_PLUS_B A+B mode for short. Sensor only outputs (A+B) DATA. TOF_RAW_FORMAT_A_MINUS_B A-B mode for short. Sensor only outputs (A-B) DATA
4.11. tof_sensor_hdr_type¶
-
Description
Define HDR type
-
Definition
typedef enum { TOF_SENSOR_HDR_NONE, TOF_SENSOR_HDR_PIXEL, TOF_SENSOR_HDR_TIME, TOF_SENSOR_HDR_NUM, }tof_sensor_hdr_type; -
Members
Member Description TOF_SENSOR_HDR_NONE Normal mode. Indicates HDR is not enabled. TOF_SENSOR_HDR_PIXEL HDR mode. Indicates pixel HDR case. TOF_SENSOR_HDR_TIME TIME HDR mode
4.12. MiTofFilterIirParam_t¶
-
Description
Parameters related to IR filter
-
Definition
typedef struct { bool enable; uint8_t gain; }MiTofFilterIirParam_t; -
Members
Member Description gain Used to adjust the strength of IIR filter [0~128]. The larger the value, the more reference to the previous frame, the more obvious the effect.0: off128: max level (default)Note: Default gain is 128. If the signal is good and temporal noise is small, the gain value can be reduced.
4.13. MiTofFilterDenoiseParam_t;¶
-
Description
Related definitions for Denoise filter
-
Definition
typedef struct { bool enable; uint16_t lpf_th; uint16_t flypix_threshold; }MiTofFilterDenoiseParam_t; -
Members
Member Description enable Whether to enable lpf_th Adjustment range (0~640). The larger the value, the more Pixels will undergo this filter processing.Default: 58freq_ratio e.g. 100M80M 290 flypix_threshold Adjustment range (0~8192). The smaller the value, the easier to perform flying pixel correction.Default: 1380freq_ratio e.g. 100M80M 6900 -
Note:
gcd = CAL_GCD(mod1_freq, mod2_freq);freq_ratio = max(mod1_freq, mod2_freq)/gcd;
4.14. MiTofFilterFlyPixelParam_t¶
-
Description
Parameter definitions related to FlyPixelFilter
-
Definition
typedef struct { bool enable; uint16_t lpf_th; uint16_t flypix_gradient_th; uint16_t flypix_diff_sum_th; }MiTofFilterFlyPixelParam_t; -
Members
Member Description Enable Enable/disable filter lpf_th Adjustment range (0~1024). The larger the value, the more Pixels will undergo this filter processing.Default: 128freq_ratio e.g. 100M80M 40 flypix_gradient_th Adjustment range (0~4096). The smaller the value, the more points will be treated as flying pixels and processed as invalid points.Default: 680freq_ratio e.g. 100M80M 3400 flypix_diff_sum_th Adjustment range (0~8192). The smaller the value, the more points will be treated as flying pixels and processed as invalid points.Default: 1024freq_ratio e.g. 100M80M 5120 -
Note:
gcd = CAL_GCD(mod1_freq, mod2_freq);freq_ratio = max(mod1_freq, mod2_freq)/gcd;
4.15. MiTofDealiaseFlyPixelParams_t¶
-
Description
Dealiase Flypixel filter parameters
-
Definition
typedef struct { bool enable; MI_U32 low_threshold; MI_U32 high_threshold; }MiTofDealiaseFlyPixelParams_t; -
Members
Member Description Enable Enable/disable low_threshold Adjustment range (0~4086). Pixels greater than low_threshold are judged as flying pixels and processed as invalid values.Default: 800 high_threshold Adjustment range (0~4096). Pixels less than high_threshold are judged as flying pixels and processed as invalid values.Default: 3200
4.16. tof_ae_sdr_params¶
-
Description
SDR Exposure strategy parameters
-
Definition
typedef struct _tof_ae_sdr_params { uint16_t black_level; uint16_t yth_low; uint16_t yth_high; uint16_t upper_cnt_limitH; uint16_t upper_cnt_limitL; uint32_t exp_limit_low; uint32_t exp_limit_high; uint32_t exp_step_slow; uint32_t exp_step_fast; }tof_ae_sdr_params; -
Members
Member Description black_level Average brightness reported by the sensor when integration time is set to 0 yth_low Minimum average brightness required for the image when adjusting integration time yth_high Maximum average brightness required for the image when adjusting integration time upper_cnt_limitH; Maximum number of pixel counts that can exceed the pixel upper threshold when adjusting integration time upper_cnt_limitL Minimum number of pixel counts that can exceed the pixel upper threshold when adjusting integration time exp_limit_low Lower limit of integration time adjustment [ns] exp_limit_high Upper limit of integration time adjustment [ns] exp_step_slow Shortest interval time for each integration time adjustment [ns] (minimum difference between two consecutive adjustments) exp_step_fast Longest interval time for each integration time adjustment [ns] (maximum difference between two consecutive adjustments)
4.17. tof_ae_hdr_params¶
-
Description
HDR Exposure strategy parameters
-
Definition
typedef struct _tof_ae_hdr_params { uint16_t black_level; uint16_t yth_low; uint16_t yth_high; uint16_t upper_cnt_limitH; uint16_t upper_cnt_limitL; uint32_t exp_limit_low; uint32_t exp_limit_high; uint32_t exp_step_slow; uint32_t exp_step_fast; }tof_ae_hdr_params; -
Members
Member Description black_level Average brightness reported by the sensor when integration time is set to 0 yth_low Minimum average brightness required for the image when adjusting integration time yth_high Maximum average brightness required for the image when adjusting integration time upper_cnt_limitH; Maximum number of pixel counts that can exceed the pixel upper threshold when adjusting integration time upper_cnt_limitL Minimum number of pixel counts that can exceed the pixel upper threshold when adjusting integration time exp_limit_low Lower limit of integration time adjustment [ns] exp_limit_high Upper limit of integration time adjustment [ns] exp_step_slow Shortest interval time for each integration time adjustment [ns] (minimum difference between two consecutive adjustments) exp_step_fast Longest interval time for each integration time adjustment [ns] (maximum difference between two consecutive adjustments)
4.18. mi_tof_hdr_frame_type¶
-
Description
Define the method of using high gain or low gain to calculate amplitude
-
Definition
typedef enum { MI_TOF_HDR_FRAME_HIGH_GAIN, MI_TOF_HDR_FRAME_LOW_GAIN, MI_TOF_HDR_FRAME_MIX, MI_TOF_HDR_FRAME_BOTH, MI_TOF_HDR_FRAME_NUM, } mi_tof_hdr_frame_type; -
Members
Member Description MI_TOF_HDR_FRAME_HIGH_GAIN Use high gain data for amplitude calculation MI_TOF_HDR_FRAME_LOW_GAIN Use low gain data for amplitude calculation MI_TOF_HDR_FRAME_MIX Currently equivalent to HDR_FRAME_LOW_GAIN in effect MI_TOF_HDR_FRAME_BOTH Provide both High gain and Low gain amplitudes.If this type of amplitude data is needed, it should be configured during MI_Tof_Init. Dynamic switching with other types is not supported. MI_TOF_HDR_FRAME_NUM -
4.19. MiTofEmbedInfo¶
-
Description
Define publicly available footer information
-
Definition
typedef struct { uint32_t frame_num; uint32_t sub_frame_number; uint32_t quad_num; uint32_t amp_mean; uint32_t amp_mean_hdr; uint32_t amp_upper_cnt; uint32_t amp_upper_cnt_hdr; uint32_t intergration_time; int16_t vcsel_temperature; int16_t sensor_temperature; uint16_t config_id; tof_sensor_hdr_type hdr_type; uint32_t dllCode; }MiTofEmbedInfo; -
Members
Member Description frame_num Indicates the current frame number sub_frame_number Indicates the current sub frame count quad_num Indicates the current quad index amp_mean Indicates the average brightness of the high gain part in the current statistical area, data needed for AE amp_mean_hdr Indicates the average brightness of the low gain part in the current statistical area, data needed for AE amp_upper_cnt Indicates the number of pixels in the high gain part of the current statistical area that are higher than amp_threshhold, data needed for AE amp_upper_cnt_hdr Indicates the number of pixels in the low gain part of the current statistical area that are higher than amp_threshhold, data needed for AE intergration_time Indicates the integration time used for the current frame, data needed for AE vcsel_temperature Indicates the current driver IC temperature sensor_temperature Indicates the current sensor temperature config_id Indicates the config_id of the current frame, generally used to check if register settings with buffer buffering have taken effect hdr_type Indicates whether pixelhdr is enabled for the current frame configuration. dllCode Indicates the code value of HW DLL lock.
4.20. MiTofInterferenceDetecedParams_t¶
-
Description
Define parameters required for enabling "interference elimination during multi-device confrontation" function
-
Definition
typedef struct MiTofInterferenceDetecedParams { MI_S32 (*SensorRestart)(MI_U8 channel); }MiTofInterferenceDetecedParams_t; -
Members
Member Description SensorRestart Callback function pointer: Close shutter -> Reset config_id -> Shutter.
4.21. MiTofDllFilterParams_t¶
-
Description
Define Dll calibration software config callback params.
-
Definition
typedef struct _MiTofDllFilterCode { MI_U16 filter_code; bool selectOn; }MiTofDllFitlerCode_t; -
Members
Member Description filter_code This value is only meaningful when selectOn is 1. selectOn 0: Use HW auto Dll;1: Switch to using "software filter's dll code" method
4.22. MiTofDllFitlerCode_t¶
-
Description
Define Dll calibration software config params.
-
Definition
typedef struct _MiTofDllFilterParams { uint8_t filter_gain; //zero: disable dll sw config. non-zero: 8 is good, range:1~16. MI_S32 (*SetDllClibSwConfig)(MI_U8 channel, MiTofDllFitlerCode_t* stFilter_code); }MiTofDllFilterParams_t; -
Members
Member Description filter_gain 0: disable the dll calibration sw config function;Non-zero: [1~16]. The smaller the gain setting, the more stable the phase; the larger the setting, the greater the weight of the current frame's x-delay code, and the faster the tracking speed when the measured phase changes drastically. SetDllClibSwConfig Callback function pointer: Used to control sensor Drv to set related registers. -
Note:
Be sure to decide whether to enable this function based on capability.
4.23. MiTofIntergrationTime_t¶
-
Description
Define integration time
-
Definition
typedef struct _MiTofIntergrationTime { MI_U32 normal_integration_time; //ns MI_U32 hdr_integration_time; //ns void *reserved; }MiTofIntergrationTime_t; -
Members
Member Description normal_integration_time Normal integration time hdr_integration_time Time HDR integration time
4.24. mi_tof_flip_type¶
-
Description
Define flip type
-
Definition
typedef enum { MI_TOF_FLIP_NONE, MI_TOF_FLIP_H, MI_TOF_FLIP_V, MI_TOF_FLIP_HV, MI_TOF_FLIP_NUM, }mi_tof_flip_type; -
Members
Member Description MI_TOF_FLIP_NONE None MI_TOF_FLIP_H Horizontal flip MI_TOF_FLIP_V Vertical flip MI_TOF_FLIP_HV Both horizontal and vertical flip MI_TOF_FLIP_NUM Num
4.25. mi_tof_rotation_type¶
-
Description
Define rotation type.
-
Definition
typedef enum { MI_TOF_ROTATION_0, MI_TOF_ROTATION_90, MI_TOF_ROTATION_180, MI_TOF_ROTATION_270, MI_TOF_ROTATION_NUM, }mi_tof_rotation_type; -
Members
Member Description MI_TOF_ROTATION_0 No rotation MI_TOF_ROTATION_90 Rotate 90° clockwise MI_TOF_ROTATION_180 Rotate 180° clockwise MI_TOF_ROTATION_270 Rotate 270° clockwise MI_TOF_ROTATION_NUM Num