SGS BF ALGORITHM USER GUIDE¶
REVISION HISTORY¶
| Revision No. | Description |
Date |
|---|---|---|
| 1.0 | 09/12/2020 | |
| 1.1 | 10/15/2020 | |
| 1.2 | 08/03/2021 | |
| 1.3 | 12/05/2022 | |
| 1.4 | 04/10/2023 | |
| 1.5 | 10/27/2023 | |
| 1.6 | 12/21/2023 | |
| 1.7 | 10/30/2024 | |
| 1.8 | 04/19/2025 | |
| 1.81 | 05/01/2025 | |
| 1.82 | 07/16/2025 | |
| 1.83 | 11/25/2025 |
1. Overview¶
1.1. Algorithm Description¶
Bf (short for Beamforming) or spatial filtering is a directional signal processing method for sensor array transmission or reception. With spatial filtering and the sensor (microphone) array, the signal from a specific angle could be strengthened, while the signal from other direction could be suppressed. Beamforming is applicable to be used at the transmitter and receiver to achieve spatial selectivity.
Keyword
-
Noise Gate and Voice Activity Detection Mode
-
The Bf filter is only updated when current frame is judged to be noise frame. If current frame is judged to be speech frame, then the Bf will use past filter for processing. Currently we support two methods to decide if current frame is noise. Please refer to AudioBfConfig.
-
noise_gate_dbfs: The volume threshold(dBFS). The current frame will be judged as noise frame if the recording volume is smaller than the threshold. Please be careful to use this parameter. This parameter must be referred to the actual volume from microphones. Range: [-80,0], the recommend value is -20, and the step size is 1.
-
vad_enable: Voice Activity Detection (VAD) Mode. Whether to use VAD method to judge the current frame is noise frame or speech frame. Range: [0,1], the recommend value is 0, and the step size is 1. If vad_enable=0, use noise_gate_dbfs for judgement. If vad_enable=1, use VAD for judgement.
-
-
Diagonal loading
In order to improve Beamforming robustness, applying diagonal loading is able to guarantee the inverse matrix exists, and hence achieve regularization. Please be careful to use this parameter. If the setting is too high, it will deteriorate spatial filtering performance. If the setting is too low, it will cause speech distortion. Range: [1,100], the recommend value is 10, and the step size is 1. Please refer to AudioBfConfig.
-
Array shape and coordinate system definition.
Bf Algorithm currently provides 1-dimensional or 2-dimensional array. Please refer to 3. Coordinate System of Microphone Array.
Note
We currently provide 2 or 4 microphone array Bf libraries. The user needs to confirm whether the corresponding Bf library is used correctly. If you need Bf library with different channel numbers, please ask algorithm owners. In order to facilitate tuning and confirm the effect of the algorithm, users are required to implement their own logic for replacing algorithm parameters and capturing audio processing results. With the help of Audio Process Chain (APC), Beamforming could achieve better signal enhancement and interference suppression effect.
1.2. Basic Structure¶
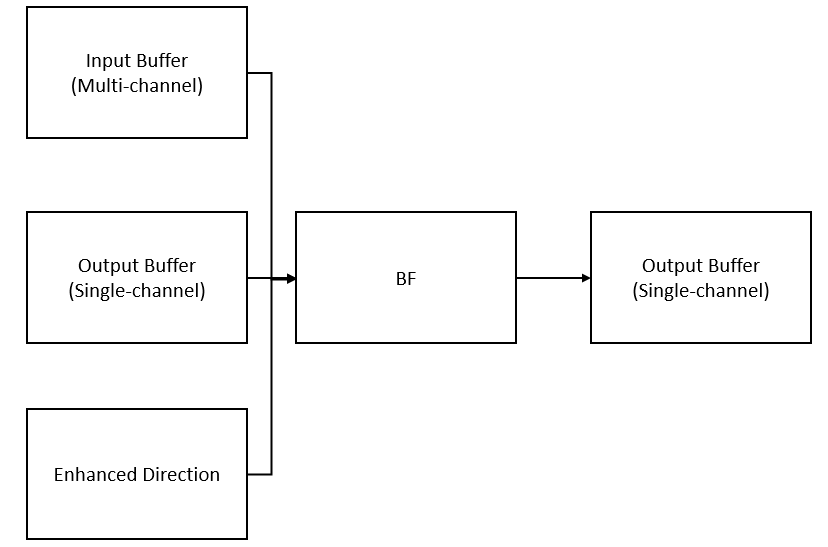
An input signal buffer and a output signal buffer are required for Bf algorithm to process. After the Bf algorithm allocates memory and completes parameter initialization and configuration, the input data buffer is processed by th Bf algorithm, and then written into the output data buffer. Notice that the length of input signal buffer and output signal buffer are not same because the Bf algorithm is a multi-channel input single channel output system.
1.3. Function Introduction¶
The Bf algorithm preserves sound from the enhanced direction and suppresses sound from other direction to improve the signal-to-interference ratio.
1.4. Application Scenarios¶
Bf algorithm is commonly applied in conference systems, building intercoms, security monitoring, and consumer electronic products. In addition to enhancing the user’s directional voice and filtering out surrounding noise, BF combined with APC can provide a comfortable audio experience with low distortion, good sound quality, and stable volume in diverse environments.
1.5. Chip Difference¶
Across different chip series, the Bf algorithm demonstrates consistent performance with no observable differences.
1.6. Examples Introduction¶
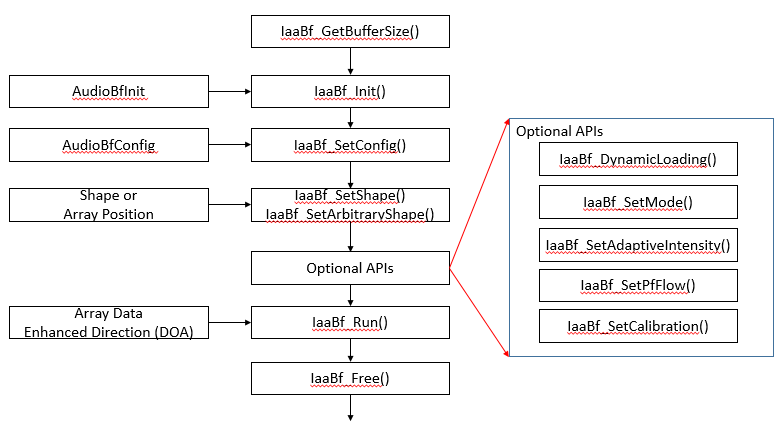
Use the Bf API to obtain the memory size required by the Bf algorithm, initialize the Bf algorithm handle, configure parameters to the Bf handle, execute the Bf algorithm, and release the Bf algorithm resources.
-
Example
-
Example I: Dual Microphone array (The microphone input is a binaural audio)
#include <stdio.h> #include <unistd.h> #include <fcntl.h> #include <string.h> #include <sys/time.h> #include <sys/ioctl.h> #include <stdlib.h> #include "AudioBfProcess.h" #define USE_MALLOC (1) typedef unsigned char uint8; typedef unsigned short uint16; typedef unsigned long uint32; float AVERAGE_RUN(int a) { static unsigned int num = 0; static float avg = 0; if(num == 0) avg = 0; num++; avg = avg + ((float)a - avg) / ((float)num); return avg; } unsigned int _OsCounterGetMs(void) { struct timeval t1; gettimeofday(&t1,NULL); unsigned int T = ( (1000000 * t1.tv_sec)+ t1.tv_usec ) / 1000; return T; } int main(int argc, char *argv[]) { short input[256]; short output[128]; char infileName[512]; char outfileName[512]; FILE * fin, * fout; ALGO_BF_RET ret; int shape = 0; float direction = 0.0; int delay_sample = 0; float avg = 0; int counter = 0; unsigned int T0,T1; AudioBfInit bf_init; AudioBfConfig bf_config; BF_HANDLE handle; bf_init.mic_distance = 8.0; bf_init.point_number = 128; bf_init.sample_rate = 16000; bf_init.channel = 2; bf_config.noise_gate_dbfs = -20; bf_config.temperature = 20; bf_config.noise_estimation = 0; bf_config.output_gain = 0.7; bf_config.vad_enable = 0; bf_config.diagonal_loading = 10; #if USE_MALLOC char *WorkingBuffer2; WorkingBuffer2 = (char*)malloc(IaaBf_GetBufferSize()); #endif handle = IaaBf_Init((char*)WorkingBuffer2, &bf_init); if (handle==NULL) { printf("BF init error\r\n"); return -1; } else { printf("BF init succeed\r\n"); } ret = IaaBf_SetConfig(handle,&bf_config); if (ret) { printf("Error occured in Config\n"); return -1; } ret = IaaBf_SetShape(handle,shape); if (ret) { printf("Error occured in Array shape\n"); return -1; } sprintf(infileName,"%s","./../sample/data/Chn-14.wav"); sprintf(outfileName,"%s","./BFOut.pcm"); fin = fopen(infileName, "rb"); if(!fin) { printf("the input file could not be open\n"); return -1; } fout = fopen(outfileName, "wb"); if(!fout) { printf("the output file could not be open\n"); return -1; } fread(input, sizeof(char), 44, fin); // read header 44 bytes fwrite(input, sizeof(char),44, fout); // write 44 bytes output // int delay_sample = 0; while(fread(input, sizeof(short), bf_init.point_number*bf_init.channel, fin)) { counter++; T0 = (long)_OsCounterGetMs(); ret = IaaBf_Run(handle,input,output,&direction); T1 = (long)_OsCounterGetMs(); avg += (T1 - T0); if(ret) { printf("Error occured in Run\n"); return -1; } fwrite(output, sizeof(short), bf_init.point_number, fout); } avg /= counter; printf("AVG is %.2f ms\n",avg); IaaBf_Free(handle); fclose(fin); fclose(fout); free(WorkingBuffer2); printf("Done\n"); return 0; } -
Example II: Multichannel Microphone array (Microphone input are 4x mono-channel audio)
#include <stdio.h> #include <unistd.h> #include <fcntl.h> #include <string.h> #include <sys/time.h> #include <sys/ioctl.h> #include <stdlib.h> #include "AudioBfProcess.h" #define MIC_NUM (4) #define USE_MALLOC (1) typedef unsigned char uint8; typedef unsigned short uint16; typedef unsigned long uint32; float AVERAGE_RUN(int a) { static unsigned int num = 0; static float avg = 0; if(num == 0) avg = 0; num++; avg = avg + ((float)a - avg) / ((float)num); return avg; } unsigned int _OsCounterGetMs(void) { struct timeval t1; gettimeofday(&t1,NULL); unsigned int T = ( (1000000 * t1.tv_sec)+ t1.tv_usec ) / 1000; return T; } int main(int argc, char *argv[]) { /*********Input file init*******/ short input[512]; short output[128]; short input_tmp1[128],input_tmp2[128],input_tmp3[128],input_tmp4[128]; FILE * fin0, * fin1, * fin2, * fin3, * fout; char infileName[MIC_NUM][512]; char outfileName[512]; ALGO_BF_RET ret; int k; float avg = 0; int counter = 0; unsigned int T0, T1; /********common setting between SSL and BF********/ int point_number = 128; float microphone_distance = 4.0; int temperature = 20; int sample_rate = 16000; int shape = 0; // int delay_sample[MIC_NUM-1] = {0,0,0}; //channel-1 float direction = 0.0; /*******BF data init*********/ #if USE_MALLOC char *WorkingBuffer_BF; WorkingBuffer_BF = (char*)malloc(IaaBf_GetBufferSize()); #endif AudioBfInit bf_init; AudioBfConfig bf_config; BF_HANDLE bf_handle; bf_init.mic_distance = microphone_distance; bf_init.point_number = point_number; bf_init.sample_rate = sample_rate; bf_init.channel = MIC_NUM; bf_config.noise_gate_dbfs = -20; bf_config.temperature = temperature; bf_config.noise_estimation = 0; bf_config.output_gain = 0.7; bf_config.vad_enable = 0; bf_config.diagonal_loading = 10; bf_handle = IaaBf_Init((char*)WorkingBuffer_BF, &bf_init); if (bf_handle==NULL) { printf("BF init error\r\n"); return -1; } else { printf("BF init succeed\r\n"); } ret = IaaBf_SetConfig(bf_handle,&bf_config); if (ret) { printf("Error occured in Config\n"); return -1; } ret = IaaBf_SetShape(bf_handle,shape); if (ret) { printf("Error occured in Array shape\n"); return -1; } /********open input file and output file*****/ sprintf(infileName[0],"%s","./../sample/data/Chn-01.wav"); sprintf(infileName[1],"%s","./../sample/data/Chn-02.wav"); sprintf(infileName[2],"%s","./../sample/data/Chn-03.wav"); sprintf(infileName[3],"%s","./../sample/data/Chn-04.wav"); sprintf(outfileName,"%s","./BFOut.pcm"); fin0 = fopen(infileName[0], "rb"); if(!fin0) { printf("the input file 0 could not be open\n"); return -1; } fin1 = fopen(infileName[1], "rb"); if(!fin1) { printf("the input file 1 could not be open\n"); return -1; } fin2 = fopen(infileName[2], "rb"); if(!fin2) { printf("the input file 2 could not be open\n"); return -1; } fin3 = fopen(infileName[3], "rb"); if(!fin3) { printf("the input file 3 could not be open\n"); return -1; } fout = fopen(outfileName, "wb"); if(!fout) { printf("the output file could not be open\n"); return -1; } fread(input, sizeof(char), 44, fin0); fread(input, sizeof(char), 44, fin1); fread(input, sizeof(char), 44, fin2); fread(input, sizeof(char), 44, fin3); fwrite(input, sizeof(char),44, fout); short * input_ptr; while(fread(input_tmp1, sizeof(short), bf_init.point_number, fin0)) { fread(input_tmp2, sizeof(short), bf_init.point_number, fin1); fread(input_tmp3, sizeof(short), bf_init.point_number, fin2); fread(input_tmp4, sizeof(short), bf_init.point_number, fin3); input_ptr = input; for(k=0;k<point_number;k++) { *input_ptr = input_tmp1[k]; input_ptr++; *input_ptr = input_tmp2[k]; input_ptr++; *input_ptr = input_tmp3[k]; input_ptr++; *input_ptr = input_tmp4[k]; input_ptr++; } counter++; T0 = (long)_OsCounterGetMs(); ret = IaaBf_Run(bf_handle,input,output,&direction); T1 = (long)_OsCounterGetMs(); avg += (T1 - T0); if(ret) { printf("Error occured in Run\n"); return -1; } fwrite(output, sizeof(short),point_number, fout); } avg /= counter; printf("AVG is %.2f ms\n",avg); IaaBf_Free(bf_handle); fclose(fin0); fclose(fin1); fclose(fin2); fclose(fin3); fclose(fout); free(WorkingBuffer_BF); printf("Done\n"); return 0; }
-
2. Specification¶
-
The number of microphones must be at least two or more.
-
The microphones specs should be the same.
-
The microphones gain should be the same.
-
For best performance, background environment should be quiet.
-
Make sure that there is no signal clipping in audio files, see below figure.
3. Coordinate System of Microphone Array¶
3.1. Multichannel Microphone array¶
Compared to dual microphone array, multichannel microphone array is capable of achieving better spatial selectivity at enhanced direction because it has better bandwidth resolution and more controllable microphone filters. In Practice, there are two main types of multichannel array system, one is the uniform linear array, and the other is uniform circular array.
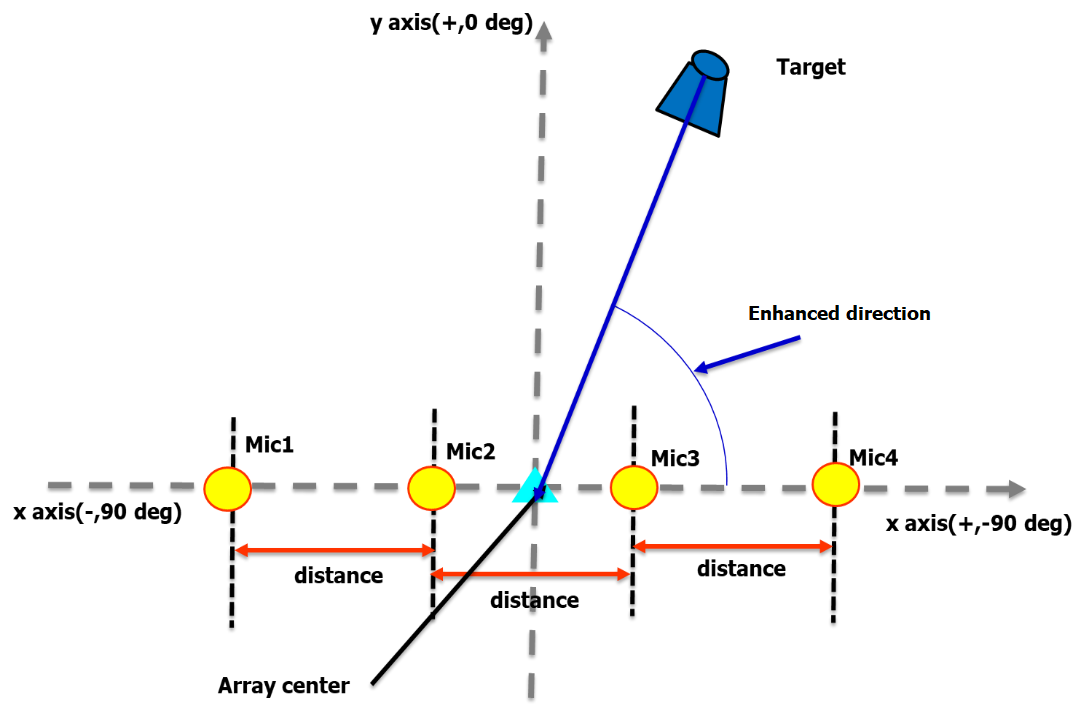
3.1.1. Uniform Linear Array¶
Uniform linear array is a line array that is spaced evenly. Because of its symmetry, only the enhanced direction located at the upper plane (from -90 degree to 90 degree) is considered. Below figure illustrates the uniform linear array and its coordinate system. The enhanced direction is defined as the angle between the array center and the x-axis where counterclockwise is positive. We recommend the distance of adjacent microphones should be bigger than 5cm or 6cm.
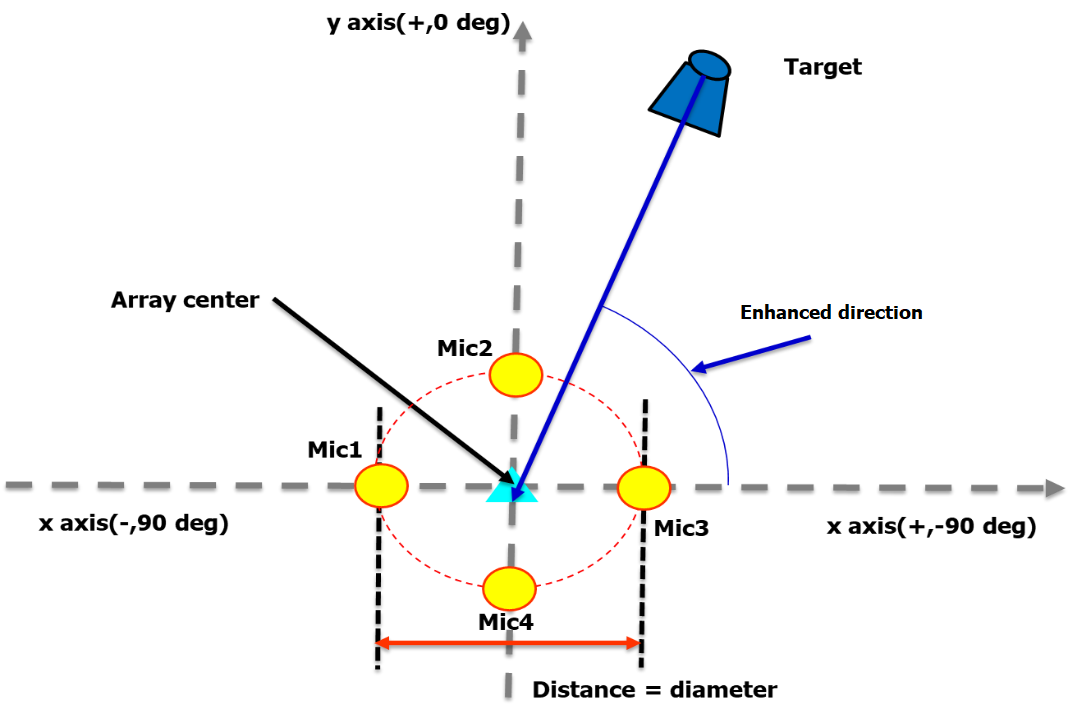
3.1.2. Uniform Circular Array¶
Uniform circular array is a circular array that the angle between adjacent microphones and array center are spaced evenly. Because of its asymmetry, the enhanced direction located at the whole plane (from -90 degree to 270 degree) is considered. Below figure illustrates the uniform circular array and its coordinate system. The enhanced direction is defined as the angle between the array center and the x-axis where counterclockwise is positive. The microphone distance is the diameter of the circle. We recommend the distance should be bigger than 6cm.
4. API Reference¶
4.1. API List¶
| API name | Features |
|---|---|
| IaaBf_GetBufferSize | Get memory size required for Bf algorithm. |
| IaaBf_Init | Initialize Bf algorithm. |
| IaaBf_SetConfig | Configure Bf algorithm. |
| IaaBf_GetConfig | Get current configuration parameters of Bf algorithm. |
| IaaBf_SetShape | Assign array shape for Bf. |
| IaaBf_Run | Bf algorithm processing. |
| IaaBf_Reset | Reinitialize Bf algorithm. |
| IaaBf_Free | Release Bf algorithm resources. |
| IaaBf_SetArbitraryShape | Assign the arbitrary array geometry for Bf. |
| IaaBf_GetArrayPosition | Obtain the mic array position from Bf. |
| IaaBf_DynamicLoading | Assign the frequency band and corresponding intensity of diagonal loading. |
| IaaBf_SetMode | Assign Bf operation mode. |
| IaaBf_SetAdaptiveIntensity | Assign the adaptive intensity for Bf mode0, mode 3 or mode4. |
| IaaBf_SetCallbackFunction | Ikayaki chip authorization and licence checking for BF algorithm( Deprecated, no longer restricted). |
| IaaBf_GetAPIVersion | Return current Bf API version. |
| IaaBf_SetPfFlow | Assign where to apply the Bf's post filter in audio flow. |
| IaaBf_SetCalibration | Calibrate the volume difference between microphones. |
| IaaBf_GetJsonFileSize | Get the memory size to parse the content of the Json file required by Bf algorithm. |
| IaaBf_InitReadFromJson | Configure Json parameters to the init structure of the Bf algorithm. |
| IaaBf_ConfigReadFromJson | Configure Json parameters to the config structure of the Bf algorithm. |
| IaaBf_OptionReadFromJson | Configure Json parameters to the option structure of the Bf algorithm. |
| IaaBf_ReadJson | Read option parameters from Json file and call Bf common API with these parameters additionally. |
| IaaBf_SetHandleId | Set Bf Handle Id. |
4.2. IaaBf_GetBufferSize¶
-
Features
Get memory size required for Bf algorithm.
-
Syntax
unsigned int IaaBf_GetBufferSize(void); -
Return value
Return value is the memory size required to run Bf algorithm.
-
Dependency
-
Header: AudioBfProcess.h
-
Library: libBF_2MIC_LINUX.so/ libBF_2MIC_LINUX.a/libBF_4MIC_LINUX.so/libBF_4MIC_LINUX.a
-
-
Note
The interface only returns the required memory size, the actions of allocating and releasing memory need to be processed by the application.
-
Example
Please refer to IaaBf_Run example.
4.3. IaaBf_Init¶
-
Features
Initialize Bf algorithm.
-
Syntax
BF_HANDLE IaaBf_Init(char* working_buffer,AudioBfInit* bf_init); -
Parameters
Parameter Name Description Input/Output working_buffer Memory address used by Bf algorithm Input bf_init Bf algorithm initialization structure pointer Input -
Return value
Return value Result Not NULL Successful NULL Failed -
Dependency
-
Header: AudioBfProcess.h
-
Library: libBF_2MIC_LINUX.so/ libBF_2MIC_LINUX.a/libBF_4MIC_LINUX.so/libBF_4MIC_LINUX.a
-
-
Example
Please refer to IaaBf_Run example.
-
Note
-
Currently, the AI model for CPU version only supports LINUX static library.
-
Currently, the AI model for IPU version supports LINUX static and dynamic libraries.
-
4.4. IaaBf_SetConfig¶
-
Features
Configure Bf algorithm.
-
Syntax
ALGO_BF_RET IaaBf_SetConfig(BF_HANDLE handle,AudioBfConfig* bf_config); -
Parameters
Parameter Name Description Input/Output handle Bf algorithm handle Input bf_config Bf algorithm configuration structure pointer Input -
Return value
Return value Result 0 Successful Non-zero Failed, refer to Error code -
Dependency
-
Header: AudioBfProcess.h
-
Library: libBF_2MIC_LINUX.so/ libBF_2MIC_LINUX.a/libBF_4MIC_LINUX.so/libBF_4MIC_LINUX.a
-
-
Example
Please refer to IaaBf_Run example.
4.5. IaaBf_GetConfig¶
-
Features
Get current configuration parameters of Bf algorithm.
-
Syntax
ALGO_BF_RET IaaBf_GetConfig(BF_HANDLE handle,AudioBfConfig* bf_config); -
Parameters
Parameter Name Description Input/Output handle Bf algorithm handle Input bf_config Bf algorithm configuration structure pointer Output -
Return value
Return value Result 0 Successful Non-zero Failed, refer to Error code -
Dependency
-
Header: AudioBfProcess.h
-
Library: libBF_2MIC_LINUX.so/ libBF_2MIC_LINUX.a/libBF_4MIC_LINUX.so/libBF_4MIC_LINUX.a
-
-
Example
Please refer to IaaBf_Run example.
4.6. IaaBf_SetShape¶
-
Features
Assign array shape for Bf.
-
Syntax
ALGO_BF_RET IaaBf_Setshape(BF_HANDLE handle,int shape); -
Parameters
Parameter Name Description Input/Output handle Bf algorithm handle Input shape The assigned array shape for Bf. 0: Uniform Linear Array. 1: Uniform Circular Array. Input -
Return value
Return value Result 0 Successful Non-zero Failed, refer to Error code -
Dependency
-
Header: AudioBfProcess.h
-
Library: libBF_2MIC_LINUX.so/ libBF_2MIC_LINUX.a/libBF_4MIC_LINUX.so/libBF_4MIC_LINUX.a
-
-
Note
-
The Bf lib only supports uniform linear array and uniform circular array. Please refer to 3. Coordinate system_of Microphone Array. IaaBf_SetArbitraryShape is applicable to special array geometry.
-
Two (dual) microphone array is always linear array.
-
The settings of array position will impact greatly on Bf performance. Therefore, the settings of array position must be matched to the microphone array being used.
-
-
Example
Please refer to IaaBf_Run example.
4.7. IaaBf_Run¶
-
Features
Bf algorithm processing.
-
Syntax
ALGO_BF_RET IaaBf_Run(BF_HANDLE handle, short* microphone_input, short* microphone_output,float* microphone_doa); -
Parameters
Parameter Name Description Input/Output handle Bf algorithm handle Input microphone_input The microphone raw data. Input microphone_output Output data after Beamforming. Output microphone_doa Enhanced direction for Beamforming. The direction could be set by user or obtained from SSL.
Range:[-90,270]. Please refer to 3. Coordinate System of Microphone Array.Input -
Return value
Return value Result 0 Successful Non-zero Failed, refer to Error code -
Dependency
-
Header: AudioBfProcess.h
-
Library: libBF_2MIC_LINUX.so/ libBF_2MIC_LINUX.a/libBF_4MIC_LINUX.so/libBF_4MIC_LINUX.a
-
-
Note
-
For dual microphone array (the microphone input is binaural data), the data pointed to microphone_input should use the sampling point as the smallest unit and be placed in the format of L,R,L,R … .The length must correspond to the point_number (the number of sampling points once beamforming process) set in IaaBf_Init. Please refer to Example I.
-
For multichannel microphone array (microphone number is bigger than two where binaural data is not enough), the input data of each microphone is mono-channel. The data pointed to microphone_input should use the sampling point as the smallest unit and be placed in the format of [Left → Right], according to the relative position. The length must correspond to the point_number (the number of sampling points once beamforming process) set in IaaBf_Init. Please refer to Example II.
-
Take 4mic uniform linear array as example, the microphone_input order should be placed in the format of [MIC1→MIC2→MIC3→MIC4].
-
The data length of microphone_output must correspond to the point_number set in IaaBf_init. For 4mic example, if point_number =128points→ microphone_input = 128x4 = 512points, and microphone_output = 128points.
-
-
Example
Please refer to 1.6. Examples Introduction.
4.8. IaaBf_Reset¶
-
Features
Reinitialize Bf algorithm.
-
Syntax
BF_HANDLE IaaBf_Reset(BF_HANDLE working_buffer,AudioBfInit* bf_init); -
Parameters
Parameter Name Description Input/Output working_buffer Bf algorithm running memory address Input bf_init Bf algorithm initialization structure pointer Input -
Return value
Return value Result Not NULL Successful NULL Failed -
Dependency
-
Header: AudioBfProcess.h
-
Library: libBF_2MIC_LINUX.so/ libBF_2MIC_LINUX.a/libBF_4MIC_LINUX.so/libBF_4MIC_LINUX.a
-
4.9. IaaBf_Free¶
-
Features
Release Bf algorithm resources.
-
Syntax
ALGO_BF_RET IaaBf_Free(BF_HANDLE handle); -
Parameters
Parameter Name Description Input/Output handle Bf algorithm handle Input -
Return value
Return value Result 0 Successful Non-zero Failed, refer to Error code -
Dependency
-
Header: AudioBfProcess.h
-
Library: libBF_2MIC_LINUX.so/ libBF_2MIC_LINUX.a/libBF_4MIC_LINUX.so/libBF_4MIC_LINUX.a
-
-
Example
Please refer to IaaBf_Run example.
4.10. IaaBf_SetArbitraryShape¶
-
Features
Assign the arbitrary array geometry for Bf.
-
Syntax
ALGO_BF_RET IaaBf_SetArbitraryShape(BF_HANDLE handle, float* array_pos); -
Parameters
Parameter Name Description Input/Output handle Bf algorithm handle Input array_pos Microphone array position pointer. Units: cm. Input -
Return value
Return value Result 0 Successful Non-zero Failed, refer to Error code -
Dependency
-
Header: AudioBfProcess.h
-
Library: libBF_2MIC_LINUX.so/ libBF_2MIC_LINUX.a/libBF_4MIC_LINUX.so/libBF_4MIC_LINUX.a
-
-
Note
-
The API supports user to set arbitrary array geometry. If this API is called after IaaBf_SetShape, it will overwrite the array_geometry defined previously by IaaBf_SetShape, vise versa.
-
The input array_pos is the two-dimensional coordinates of Cartesian coordinate system with the order [X,Y]. Therefore, it must contain (numbers of microphone x 2) elements.
-
The position of array center is the average value of the given array_pos along [X,Y] axis, respectively. The position of each microphone is the vector pointing from array center to each microphone.
-
Notice that the microphone_doa(enhanced direction) for the system is still defined as the angle between the array center and the x-axis where counterclockwise is positive.
-
Giving array_pos:{-4,-2,-1,-3,2,3,4,2}, the array center is [X=0.25,Y=0], while Mic1’s [X,Y] is [-4.25,-2], Mic2’s [X,Y] is [-1.25,-3], Mic3’s [X,Y] is [1.75,3], and Mic4’s [X,Y] is [3.75,2].
-
4.11. IaaBf_GetArrayPosition¶
-
Features
Obtain the mic array position from Bf.
-
Syntax
ALGO_BF_RET IaaBf_GetArrayPosition(BF_HANDLE handle,float* array_pos); -
Parameters
Parameter Name Description Input/Output handle Bf algorithm handle Input array_pos Microphone array position pointer. Units: cm. Input/Output -
Return value
Return value Result 0 Successful Non-zero Failed, refer to Error code -
Dependency
-
Header: AudioBfProcess.h
-
Library: libBF_2MIC_LINUX.so/ libBF_2MIC_LINUX.a/libBF_4MIC_LINUX.so/libBF_4MIC_LINUX.a
-
-
Note
-
The output is the three-dimensional coordinates of Cartesian coordinate system with the order [x,y,z] while the value of z-axis will always be zero. The array_pos must contain (number of microphone x 3) elements.
-
If the API is called after IaaBf_SetShape, the output order of the microphone array is same as Section 3.1 (From left to right).
-
If the API is called after IaaBf_SetArbitraryShape, the output order of the microphone array is same as IaaBf_SetArbitraryShape.
-
The API is only applicable to obtain the array position. It won’t affect the BF performance.
-
4.12. IaaBf_DynamicLoading¶
-
Features
Assign the frequency band and corresponding intensity of diagonal loading.
-
Syntax
ALGO_BF_RET IaaBf_DynamicLoading(BF_HANDLE handle,int* band, int* dl_intensity, int* is_dynamic); -
Parameters
Parameter Name Description Input/Output handle Bf algorithm handle Input band Frequency band pointer. Range: [0,128]; step size: 1 Input dl_intensity Diagonal loading intensity pointer.
Range: [1,1000]; step size: 1Input is_dynamic 0: disable 1: enable Input -
Return value
Return value Result 0 Successful Non-zero Failed, refer to Error code -
Dependency
-
Header: AudioBfProcess.h
-
Library: libBF_2MIC_LINUX.so/ libBF_2MIC_LINUX.a/libBF_4MIC_LINUX.so/libBF_4MIC_LINUX.a
-
-
Note
-
IaaBf_SetConfig must be called before using this API and the dl_intensity is only applied to BF algorithm when is_dynamic equals 1.
-
The first six elements of band are used to set different frequency subbands. Thus, totally seven frequency subbands are obtained. Notice that the elements must be in ascending order.
-
The first seven elements of dl_intensity are used to set the intensity for seven frequency subbands, which is able to amplify the diagonal_loading in AudioBfConfig for each frequency subbands, respectively.
-
The highest frequency corresponding to the current sampling rate is divided into 128 parts evenly. For example, the sampling rate is 16K, the corresponding maximum frequency is 8K, each one is 8000 / 128 ≈ 62.5Hz.
-
Under the band settings {4,6,36, 49,50,51}, the corresponding frequency subbands are set as {0~4 * 62.5Hz, 4~6 * 62.5Hz, 6~36 * 62.5Hz, 36~49 * 62.5Hz, 49~50 * 62.5Hz, 50~51 * 62.5Hz, 51-127 * 62.5Hz} = {0~250Hz, 250~375Hz, 375~2250Hz, 2250~3062.5Hz, 3062.5~3125Hz, 3125~3187.5Hz, 3187.5Hz~8000Hz}.
-
Optional API (Default: Disable). The algorithm will be executed based on diagonal loading set in AudioBfConfig.
-
4.13. IaaBf_SetMode¶
-
Features
Assign Bf operation mode.
-
Syntax
ALGO_BF_RET IaaBf_SetMode(BF_HANDLE handle,float choose_doa, int mode); -
Parameters
Parameter Name Description Input/Output handle Bf algorithm handle Input choose_doa Enhanced direction for Beamforming. The direction could be set by user or obtained from SSL.
Range:[-90,270]. Please refer to 3. Coordinate System of Microphone Array.Input mode Range: [0,4]. Step size: 1 Input -
Return value
Return value Result 0 Successful Non-zero Failed, refer to Error code -
Dependency
-
Header: AudioBfProcess.h
-
Library: libBF_2MIC_LINUX.so/ libBF_2MIC_LINUX.a/libBF_4MIC_LINUX.so/libBF_4MIC_LINUX.a
-
-
Note
-
Our Bf library supports mode from 0~4. 0: Adaptive Beamforming, 1: Fixed Beamforming, 2: GSC Beamforming, 3: Enhanced-Adaptive Beamforming, 4: AI Beamforming. If the API is not used, the default mode is 0: Adaptive Beamforming.
-
Speed: Mode 1 > Mode 2 > Mode 0 > Mode 3 > Mode 4. BF performance: Mode4 > Mode 3 > Mode 0 > Mode 2 > Mode 1.
-
Mode 3 and Mode 4 are both post filter for Mode 0 output. User can set different enhanced direction (choose_doa) to further improve the effect of spatial filtering but may have few distortion. Notice that there isn't a rotational relationship between different directions due to array physical characteristics. User can tune the intensity of post filter via IaaBf_SetAdaptiveIntensity.
-
When either BF mode 3 or BF mode 4 and APC are used simultaneously, IaaApc_EnhanceNNBFMode must be called in APC algorithm. In addition, The user can use IaaBf_SetPfFlow to assign where to apply the post filter in the audio workflow. The algorithm supports four positions to apply post filter currently. (1) After BF's Output. (2)BF->APC, After APC's Output (3) BF->AEC->APC, After APC's Output. (4) BF->AEC->AIWNR->APC, After APC's Output.
-
It's better to use linear array with 5cm spacing when using Mode 4 (AIBF not guarantee the performance with other spacing). Notice that Mode 4 is only provided with LINUX library.
-
4.14. IaaBf_SetAdaptiveIntensity¶
-
Features
Assign the adaptive intensity for Bf mode0, mode 3 or mode4.
-
Syntax
ALGO_BF_RET IaaBf_SetAdaptiveIntensity(BF_HANDLE handle,int intensity); -
Parameters
Parameter Name Description Input/Output handle Bf algorithm handle Input intensity Range: [0,4]. Step size: 1.
0: low; 1,2: normal; 3,4: highInput -
Return value
Return value Result 0 Successful Non-zero Failed, refer to Error code -
Dependency
-
Header: AudioBfProcess.h
-
Library: libBF_2MIC_LINUX.so/ libBF_2MIC_LINUX.a/libBF_4MIC_LINUX.so/libBF_4MIC_LINUX.a
-
-
Note
-
The API will assign the intensity of Adaptive Bf such as mode0, mode3, and mode4. When the intensity becomes bigger, the spatial filtering performance will be better while it may introduce more distortion, especially for Enhanced-Adaptive Bf and AI Bf.
-
Default intensity=1.
-
4.15. IaaBf_SetCallbackFunction¶
-
Features
Ikayaki chip authorization and licence checking for BF algorithm (Deprecated, no longer restricted).
-
Syntax
ALGO_BF_RET IaaBf_SetCallbackFunction(int(*log)(const char *szFmt, ...),int(*envSet)(char *key, char *par),int(*envGetString)(char *var, char *buf, unsigned int size),int(*envSave)(void),int(*readUuid)(unsigned long long *u64Uuid)); -
Parameters
Parameter Name Description Input/Output log Function pointer for debugging message Input envSet Function pointer for setting environment variables Input envGetString Function pointer for obtaining the license message from envrionment variables Input envsave Function pointer for saving the calculated authorized message to environment variables ( No practical usage currently) Input readUuid Function pointer for reading the Uuid from chip waited for authorization Input -
Return value
Return value Result 0 Successful Non-zero Failed, refer to error code -
Dependency
-
Header: AudioBfProcess.h
-
Library: libBF_2MIC_LINUX.so/ libBF_2MIC_LINUX.a/libBF_4MIC_LINUX.so/libBF_4MIC_LINUX.a
-
-
Note
-
The API for authorization is only for Ikayaki chip.
-
If using Ikayaki chip, there will be a corrsponding usage time with BF algorithm depending on the results of authorization.
-
4.16. IaaBf_GetAPIVersion¶
-
Features
Return current Bf API version.
-
Syntax
ALGO_BF_RET IaaBf_GetAPIVersion(unsigned short* major, unsigned short* minor); -
Parameters
Parameter Name Description Input/Output major Main API version Input/Output minor Secondary API version Input/Output -
Return value
Return value Result 0 Successful Non-zero Failed, refer to Error code -
Dependency
-
Header: AudioBfProcess.h
-
Library: libBF_2MIC_LINUX.so/ libBF_2MIC_LINUX.a/libBF_4MIC_LINUX.so/libBF_4MIC_LINUX.a
-
4.17. IaaBf_SetPfFlow¶
-
Features
Assign where to apply the Bf's post filter in audio flow.
-
Syntax
ALGO_BF_RET IaaBf_SetPfFlow(BF_HANDLE handle, BF_WORKFLOW bf_workflow); -
Parameters
Parameter Name Description Input/Output handle Bf algorithm handle Input bf_workflow Position where the post filter is applied Input -
Return value
Return value Result 0 Successful Non-zero Failed, refer to Error code -
Dependency
-
Header: AudioBfProcess.h
-
Library: libBF_2MIC_LINUX.so/ libBF_2MIC_LINUX.a/libBF_4MIC_LINUX.so/libBF_4MIC_LINUX.a
-
-
Note
-
The algorithm supports four positions to apply post filter. 0(BF->APC): After APC's output. 1(BF) : After BF's output. 2(BF->AEC->APC): After APC's output. 3(BF->AEC->AIWNR->APC): After APC's output. If the API is not used, the default position is 1: After BF's Output.
-
When bf_workflow is assigned as 0, the post filter would be applied after APC's output. The built-in conventional noise reduction effect from BF would be closed while the user can tune the noise reduction performance via APC.
-
When bf_workflow is assigned as 1, the post filter would be applied after BF's output. The built-in conventional noise reduction effect from BF would be opened. It's recommended to turn off NR from APC to avoid too much distortion.
-
When bf_workflow is assigned as 2, it means that AEC is implemented between BF and APC. The post filter would be applied after APC's output. The built-in conventional noise reduction effect from BF would be closed while the user can tune the noise reduction performance via APC.
-
When bf_workflow is assigned as 3, it means that AEC and AI-based WNR are implemented between BF and APC. The post filter would be applied after APC's output. The built-in conventional noise reduction effect from BF would be closed while the user can tune the noise reduction performance via APC.
-
4.18. IaaBf_SetCalibration¶
-
Features
Calibrate the volume difference between microphones.
-
Syntax
ALGO_BF_RET IaaBf_SetCalibration(BF_HANDLE handle, BF_CALIBRATION calibration_flag); -
Parameters
Parameter Name Description Input/Output handle Bf algorithm handle Input calibration_flag Flag to decide if using calibration. Please refer to BF_CALIBRATION Input -
Return value
Return value Result 0 Successful Non-zero Failed, refer to Error code -
Dependency
-
Header: AudioBfProcess.h
-
Library: libBF_2MIC_LINUX.so/ libBF_2MIC_LINUX.a/libBF_4MIC_LINUX.so/libBF_4MIC_LINUX.a
-
-
Note
- The API will calibrate the volume difference between microphones. 0: Without calibration. 1: With calibration. If the API is not used, the default mode is 0: without calibration.
4.19. IaaBf_GetJsonFileSize¶
-
Features
Get the memory size to parse the content of the Json file required by Bf algorithm.
-
Syntax
unsigned int IaaBf_GetJsonFileSize(char* jsonfile); -
Parameters
Parameter Name Description Input/Output jsonfile Json file name Input -
Return value
Return value is the memory size required for decoding json file.
-
Dependency
-
Header: AudioBfProcess.h
-
Library: libBF_2MIC_LINUX.so/ libBF_2MIC_LINUX.a/libBF_4MIC_LINUX.so/libBF_4MIC_LINUX.a
-
4.20. IaaBf_InitReadFromJson¶
-
Features
Configure Json parameters to the init structure of the Bf algorithm.
-
Syntax
ALGO_BF_RET IaaBf_InitReadFromJson(AudioBfInit* bf_init, char* jsonBuffer, char* jsonfile, unsigned int buffSize); -
Parameters
Parameter Name Description Input/Output bf_init Bf algorithm initialization structure handle Input/Output jsonBuffer The memory address used to parse the Json file content Input jsonfile Json file name Input buffSize The memory size required to parse the Json file content Input -
Return value
Return value Result 0 Successful Non-zero Failed, refer to Error code -
Dependency
-
Header: AudioBfProcess.h
-
Library: libBF_2MIC_LINUX.so/ libBF_2MIC_LINUX.a/libBF_4MIC_LINUX.so/libBF_4MIC_LINUX.a
-
-
Note
The API parses the initialization parameters into AudioBfInit structure from jsonfile, and is going to be used by IaaBf_Init.
4.21. IaaBf_ConfigReadFromJson¶
-
Features
Configure Json parameters to the config structure of the Bf algorithm.
-
Syntax
ALGO_BF_RET IaaBf_ConfigReadFromJson(AudioBfConfig* bf_config, char* jsonBuffer, char* jsonfile, unsigned int buffSize); -
Parameters
Parameter Name Description Input/Output bf_config Configure the structure handle of the Bf algorithm Input/Output jsonBuffer The memory address used to parse the Json file content Input jsonfile Json file name Input buffSize The memory size required to parse the Json file content Input -
Return value
Return value Result 0 Successful Non-zero Failed, refer to Error code -
Dependency
-
Header: AudioBfProcess.h
-
Library: libBF_2MIC_LINUX.so/ libBF_2MIC_LINUX.a/libBF_4MIC_LINUX.so/libBF_4MIC_LINUX.a
-
-
Note
The API parses the config parameters into AudioBfConfig structure from jsonfile, and is going to be used by IaaBf_SetConfig.
4.22. IaaBf_OptionReadFromJson¶
-
Features
Configure Json parameters to the option structure of the Bf algorithm.
-
Syntax
ALGO_BF_RET IaaBf_OptionReadFromJson(AudioBfOption* bf_option, char* jsonBuffer, char* jsonfile, unsigned int buffSize);; -
Parameters
Parameter Name Description Input/Output bf_option Configure the option handle of the BF algorithm Input/Output jsonBuffer The memory address used to parse the Json file content Input jsonfile Json file name Input buffSize The memory size required to parse the Json file content Input -
Return value
Return value Result 0 Successful Non-zero Failed, refer to Error code -
Dependency
-
Header: AudioBfProcess.h
-
Library: libBF_2MIC_LINUX.so/ libBF_2MIC_LINUX.a/libBF_4MIC_LINUX.so/libBF_4MIC_LINUX.a
-
-
Note
The API parses the option parameters into AudioBfOption structure from jsonfile, and is going to be used by IaaBf_SetShape,IaaBf_Run,IaaBf_SetArbitraryShape,IaaBf_DynamicLoading,IaaBf_SetMode,IaaBf_SetAdaptiveIntensity](#414-iaabf_setadaptiveintensity),IaaBf_SetPfFlow,IaaBf_SetCalibration,IaaBf_ReadJson.
4.23. IaaBf_ReadJson¶
-
Features
Read option parameters from Json file and call Bf common API with these parameters additionally.
-
Syntax
ALGO_BF_RET IaaBf_ReadJson(BF_HANDLE handle,AudioBfOption* bf_option, char* jsonBuffer, char* jsonfile, unsigned int buffSize); -
Parameters
Parameter Name Description Input/Output handle Bf algorithm handle Input bf_option Configure the option handle of the BF algorithm Input/Output jsonBuffer The memory address used to parse the Json file content Input jsonfile Json file name Input buffSize The memory size required to parse the Json file content Input -
Return value
Return value Result 0 Successful Non-zero Failed, refer to Error code -
Dependency
-
Header: AudioBfProcess.h
-
Library: libBF_2MIC_LINUX.so/ libBF_2MIC_LINUX.a/libBF_4MIC_LINUX.so/libBF_4MIC_LINUX.a
-
-
Note
The API reads the AudioBfOption parameters from jsonfile, and additionally calls common API IaaBf_SetShape,IaaBf_SetMode,IaaBf_SetAdaptiveIntensity,IaaBf_SetPfFlow,IaaBf_SetCalibration with these parameters.
4.24. IaaBf_SetHandleId¶
-
Features
Set Bf Handle Id.
-
Syntax
ALGO_BF_RET IaaBf_SetHandleId(BF_HANDLE handle, int id); -
Parameters
Parameter Name Description Input/Output handle Bf algorithm handle Input id Bf handle id
range:[0,100]Input -
Return value
Return value Result 0 Successful Non-zero Failed, refer to Error code -
Dependency
-
Header: AudioBfProcess.h
-
Library: libBF_2MIC_LINUX.so/ libBF_2MIC_LINUX.a/libBF_4MIC_LINUX.so/libBF_4MIC_LINUX.a
-
5. Bf Data Type¶
5.1. Bf data type list¶
| DATA TYPE | Description |
|---|---|
| AudioBfInit | Bf algorithm initialization parameter structure type. |
| AudioBfConfig | Bf algorithm configuration parameter structure type. |
| BF_HANDLE | Bf algorithm handle type. |
| BF_WORKFLOW | Assign the post filter position for Bf algorithm. |
| BF_CALIBRATION | Bf algorithm volume calibration indicator. |
| AudioBfOption | Bf algorithm option parameter structure type. |
5.2. AudioBfInit¶
-
Description
Bf algorithm initialization parameter structure type.
-
Definition
typedef struct { unsigned int point_number; unsigned int sample_rate; float mic_distance; unsigned int channel; }AudioBfInit; -
Member
Member name Description point_number The sampling points that Bf algorithm processed once. Only support 128 points sample_rate Sampling rate, currently supports 8k/16k/32k/48k. mic_distance The distance between adjacent mics, unit: cm, recommend: 5cm or 6cm channel Number of channels. Only support 2 or 4 microphones -
Related data types and interfaces
5.3. AudioBfConfig¶
-
Description
Bf algorithm configuration parameter structure type.
-
Definition
typedef struct { unsigned int temperature; int noise_gate_dbfs; int noise_estimation; float output_gain; int vad_enable; int diagonal_loading; }AudioBfConfig; -
Member
Member name Description temperature Ambient temperature (Celsius). Celsius = (5/9) * (Fahrenheit-32). Step size is 1. noise_gate_dbfs Noise volume threshold. This parameter must be referred to the actual recording volume. Please be careful to use this parameter. Range: [-80,0]. Recommend: -20. Step size is 1. noise_estimation Noise estimation mode. Range: [0,1]. 0: adaptation method. 1: average method. Recommend: 0 output_gain Output signal gain. Range: [0~1]. 0.7: 0dB gain. 1: 3~4dB gain. Recommend: 0.7. vad_enable Whether to use Voice Activity detection (VAD). Range: [0,1]. 1: VAD is used to decide whether each frame is noise part. 0: noise_gate_dbfs is used to decide whether each frame is noise part. Recommend: 0. diagonal_loading Regularization term for inverse matrix. Range: [1,100]. Step size: 1. Please be careful to use this parameter. If diagonal loading is too high, it will cause result not good enough. If diagonal loading is too low, it will cause speech distortion. Recommend: 10. -
Related data types and interfaces
5.4. BF_HANDLE¶
-
Description
Bf algorithm handle type.
-
Definition
typedef void* BF_HANDLE; -
Related data types and interfaces
5.5. BF_WORKFLOW¶
-
Description
Assign the post filter position for Bf algorithm.
-
Definition
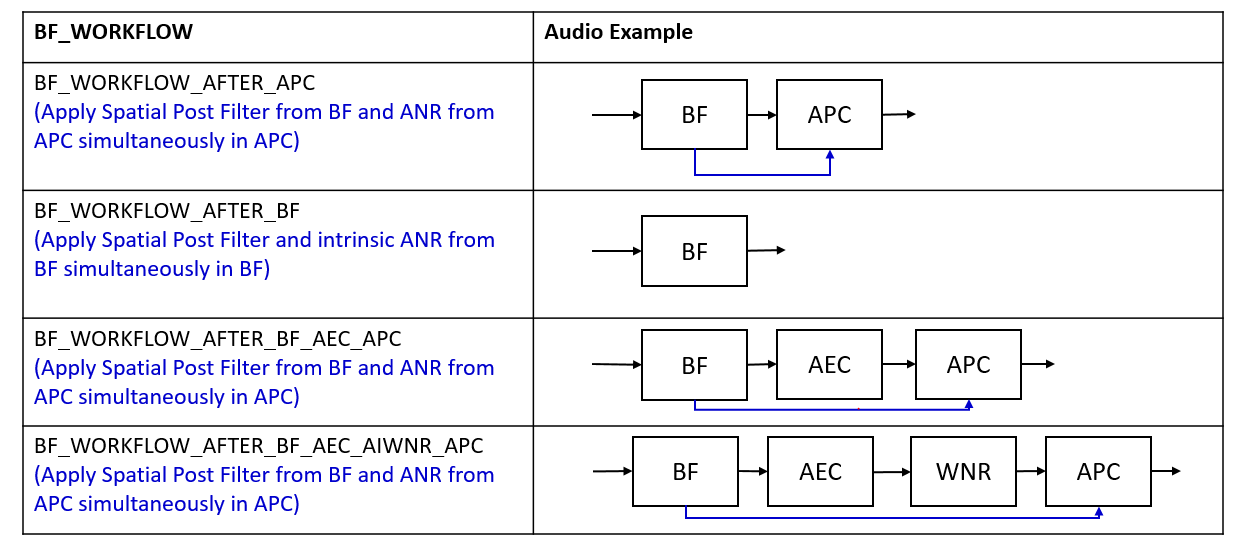
typedef enum { BF_WORKFLOW_AFTER_APC = 0, BF_WORKFLOW_AFTER_BF = 1, BF_WORKFLOW_AFTER_BF_AEC_APC = 2, BF_WORKFLOW_AFTER_BF_AEC_AIWNR_APC = 3, }BF_WORKFLOW; -
Member
Member name Description BF_WORKFLOW_AFTER_APC Apply post filter after APC BF_WORKFLOW_AFTER_BF Apply post filter after BF BF_WORKFLOW_AFTER_BF_AEC_APC Apply post filter after APC when an AEC is implemented between BF and APC BF_WORKFLOW_AFTER_BF_AEC_AIWNR_APC Apply post filter after APC when an AEC and AI-based WNR are implemented between BF and APC -
Related data types and interfaces
5.6. BF_CALIBRATION¶
-
Description
Bf algorithm volume calibration indicator.
-
Definition
typedef enum { BF_CALIBRATION_DISABLE = 0, BF_CALIBRATION_ENABLE = 1, }BF_CALIBRATION; -
Member
Member name Description BF_CALIBRATION_DISABLE Bf processing without calibrating volume difference BF_CALIBRATION_ENABLE Calibrate the volume difference before Bf processing -
Related data types and interfaces
5.7. AudioBfOption¶
-
Description
Bf algorithm option parameter structure type.
-
Definition
typedef struct { int shape; float direction; int is_dynamic; int mode; int intensity; BF_WORKFLOW bf_workflow; BF_CALIBRATION calibration_flag; float array_pos[8]; int band[6]; int dl_intensity[7]; }AudioBfOption; -
Member
Member name Description shape Please refer to IaaBf_SetShape direction Please refer to IaaBf_SetMode,IaaBf_Run is_dynamic Please refer to IaaBf_DynamicLoading mode Please refer to IaaBf_SetMode intensity Please refer to IaaBf_SetAdaptiveIntensity bf_workflow Please refer to IaaBf_SetPfFlow calibration_flag Please refer to IaaBf_SetCalibration array_pos Please refer to IaaBf_SetArbitraryShape band Please refer to IaaBf_DynamicLoading dl_intensity Please refer to IaaBf_DynamicLoading -
Note
Please use the option parameters with the corresponding API. Without calling these APIs, the parameter settings will not be applied to the algorithm.
-
Related data types and interfaces
6. Error code¶
Bf API error codes are shown as follow:
| Error code | Definition | Description |
|---|---|---|
| 0x00000000 | ALGO_BF_RET_SUCCESS | Bf runs successfully. |
| 0x10000301 | ALGO_BF_RET_INIT_ERROR | Invalid Bf initialization. |
| 0x10000302 | ALGO_BF_RET_INVALID_CONFIG | Invalid Bf Config. |
| 0x10000303 | ALGO_BF_RET_INVALID_HANDLE | Invalid Bf Handle. |
| 0x10000304 | ALGO_BF_RET_INVALID_NOISE_ESTIMATION | Invalid Bf noise estimation settings. |
| 0x10000305 | ALGO_BF_RET_INVALID_VAD_ENABLE | Invliad VAD settings for BF. |
| 0x10000306 | ALGO_BF_RET_INVALID_OUTPUT_GAIN | Invalid Bf output gain settings. |
| 0x10000307 | ALGO_BF_RET_INVALID_INPUT_POINTER | Invalid Bf input indicator. |
| 0x10000308 | ALGO_BF_RET_INVALID_SAMPLERATE | Invalid Bf sampling rate. |
| 0x10000309 | ALGO_BF_RET_INVALID_POINTNUMBER | Invalid Bf sampling point. |
| 0x10000310 | ALGO_BF_RET_INVALID_CHANNEL | Invalid Bf channel number. |
| 0x10000311 | ALGO_BF_RET_INVALID_CALLING | Bf API sequence error. |
| 0x10000312 | ALGO_BF_RET_API_CONFLICT | Other APIs are running. |
| 0x10000313 | ALGO_BF_RET_INVALID_GEOMETRY_TYPE | Invalid Bf array shape. |
| 0x10000314 | ALGO_BF_RET_INVALID_MIC_DISTANCE | Invalid Bf microphone distance. |
| 0x10000315 | ALGO_BF_RET_INVALLD_DYNAMIC_BAND | Invalid Bf band and dl_intensity. |
| 0x10000316 | ALGO_BF_RET_INVALID_SETMODE | Invalid Bf operation mode. |
| 0x10000317 | ALGO_BF_RET_INVALID_GETPOSITION | Bf fails to get array position. |
| 0x10000318 | ALGO_BF_RET_INVALID_SETINTENSITY | Bf fails to assign adaptive intensity. |
| 0x10000319 | ALGO_BF_RET_INVALID_SETCALLBACK | Warning: Bf authorization and license checking fails. |
| 0x10000320 | ALGO_BF_RET_INVALID_SETPFFLOW | Bf fails to assign post filter position. |
| 0x10000321 | ALGO_BF_RET_INVALID_CALIBRATION | Bf fails to calibrate volume difference. |
| 0x10000322 | ALGO_BF_RET_INVALID_JSONFILE | Bf fails to open Json file. |
7. Relationship between Bf and APC connection¶
The user can customize the location where the Bf post filter is applied and the source of ANR module (from Bf intrinsic conventional NR or from APC) within overall system.
- Examples of Bf and APC connection
ret = IaaBf_SetPfFlow(handle_bf, BF_WORKFLOW_AFTER_APC); while(fread(input, sizeof(short), bf_init.point_number*bf_init.channel, fin)) { ret = IaaBf_Run(handle_bf,input,output,&direction); ret = IaaApc_EnhanceNNBFMode(handle_apc,handle_bf,1); ret = IaaApc_Run(handle_apc,output); }