IS(Image Stabilization) DEBUG SOP¶
REVISION HISTORY¶
| Revision No. | Description |
Date |
|---|---|---|
| 1.00 | 12/13/2023 | |
| 08/11/2025 |
1. 前言¶
该文档主要收录在使用防抖功能时,所遇到常见问题的定位或排查方法。
- 注意:
- 防抖功能位于MI_LDC 模块中,其中分为DIS-GME(DIS,数字防抖)与DIS-GYRO(EIS,电子防抖)两大类。
2. 问题快速索引清单¶
3. DIS-GME模式常见问题¶
3.1 DIS处理流程卡死¶
在软件处理流程中,负责防抖处理主要逻辑位于DIS PASS(即为MI_LDC模块中pass0)。
3.1.1 现象¶
在发生该种情况时,一般会伴随着掉帧、无流、刷如下log:
# 情况1:output task卡住
[MI WRN] _MI_SYS_Pass_TryDequeueOutputTaskNoLock[6154]: [thread:ldc0_P0_MAIN] mod[23] dev[0] pass[0] chn[0] output not finished more than 5000ms;
[MI WRN] _MI_SYS_Pass_DebugDumpOutputTaskFence[371]: [0:c71dbe00 0000000d] fence39
# 情况2:input task卡住
[MI WRN] _MI_SYS_Pass_TryDequeueInputTaskNoLock[3325]: [thread:ldc0_P0_MAIN] mod[23] dev[0] pass[0] chn[0] inputtask's fence not finished more than 5000ms;
[MI WRN] _MI_SYS_Pass_TryDequeueInputTaskNoLock[3391]: [thread:ldc0_P0_MAIN] mod[23] dev[0] pass[0] chn[0] inputtask CheckInputTaskStatus failed more than 5000ms,total pending task32;
3.1.2 排查方向¶
STEP1:排查死锁可能性
- 执行echo show_threads > /proc/mi_modules/mi_ldc/mi_ldc0;
- 查看log是否有LDC/DIS字样的API一直在等锁或信号量;
STEP2:排查硬件卡住可能性
- 执行/customer/riux32_r 0x1b24;
- 查看offset 0x11的值是否过大,如果存在千万以上的值,大概率是硬件卡住;
STEP3:排查软件卡住可能性
- 执行echo 7 > /proc/mi_modules/mi_ldc/debug_level;
- 查看ldc log是否存在异常,如重复打印同一句或一种类型的log(处于某种循环);
STEP4:如果上述步骤无法解决
- 将上述步骤的执行log收集提供给模块owner;
- 执行cat /proc/mi_modules/mi_ldc/mi_ldc0,保存log提供给模块owner;
- 说明客户场景,如帧率、分辨率、模块channel使用情况;
3.2 CMDQ Timeout¶
遇到该问题时,由于可能与硬件或下的指令有关,需请FAE同事抓取log给模块owner进行分析,具体步骤如下。
3.2.1 现象¶
触发该问题时,首先需要确认是否有使用DIS的场景,其次CMDQ ID是否为CVS_TRIG,现象如下:
<3>[CMDQ]cmdq(4)[35m ERR: WAIT_TRIG_TIMEOUT [m(0x00000400)
<3>[CMDQ][35mCmd data = 0x2000 : 0x0000 : 0x0000 : 0xFFFE
<3>[CMDQ][35mCmd:WAIT, dbg:0, adr:000000, dat:0000, mask:fffe
<3>[CMDQ][35mWait command timeout. Trigger_Bus Bit [0] Event [CVS_TRIG]
3.2.2 抓取log步骤¶
STEP1: disable cmdq reset option
执行如下命令,若明确已disable,可直接在触发问题的情况下执行STEP3:
vi /config/modparam.json; # 添加"bEnableCmdqReset":0内容到sys的节点
sync;
reboot; # 或执行echo /config/modparam.json > /proc/mi_modules/mi_common/modparam
STEP2: 重新运行app,待问题复现,保留现场
STEP3: 执行如下命令,抓取log给模块owner
#!/bin/bash
for((i=0;i<5;i+=1));
do
/customer/riux32_r 0x1038;
/customer/riux32_r 0x1b24;
cat /proc/mi_modules/mi_ldc/mi_ldc0;
done
3.3 CVS_R / CVS_W MIU HitAddress or MMU Callback¶
遇到该问题时,由于可能与实际运行的时序有关,需请FAE同事按如下步骤抓取log给模块owner分析。
3.3.1 现象¶
触发该问题时,首先需要确认是否有使用DIS的场景,其次访问ID是否为CVS_R/W,现象如下:
#情况1:MMU Callback
[MI WRN] MI_SYS_Mma_MmuCallback[357]: [MI_SYS_Mma_MmuCallback] Status=0x4, PhyAddr=0x402c20000, ClientId=0x4c,Name=CVS_W IsWrite=1
[MI WRN] MI_SYS_Mma_MmuCallback[357]: [MI_SYS_Mma_MmuCallback] Status=0x4, PhyAddr=0x402c20000, ClientId=0x4c,Name=CVS_R IsWrite=1
#情况2:MIU HitAddress
MIU0 Block:1 WR Client:CVS_W ID:4-12 Hitted_Address(MIU):0x3ffe0000<->0x3ffe000f
MIU0 Block:1 WR Client:CVS_R ID:4-12 Hitted_Address(MIU):0x3ffe0000<->0x3ffe000f
3.3.2 抓取log步骤¶
STEP1:修改modparam.json,开启debug MMU与disable miuprotect
vi /config/modparam.json; # 添加"debugMmu":1,"g_bEnableMiuProtect":0 内容到sys的节点
sync;
reboot; # 或执行echo /config/modparam.json > /proc/mi_modules/mi_common/modparam
STEP2:执行如下命令,抓取信息提供给模块owner
echo debug_mmu debug_log 1 23 > /proc/mi_modules/mi_sys/mi_sys0;
echo 7 > /proc/mi_modules/mi_ldc/debug_level;
3.4 花屏¶
触发该问题时,需要明确是哪级模块的责任,若怀疑是MI_LDC(DIS),执行如下步骤:
3.4.1 现象¶
出现该问题时,一般从rtsp拉流可看到画面出现黑边、绿条等现象。
3.4.2 排查方向¶
STEP1: dump MI_LDC的输入和输出,确认是否有问题
# dump input task, dis passid=0, chnid需与客户实际场景确认
# echo dumpinputtask [chnid, passid, cnt, path] > /proc/mi_modules/mi_ldc/mi_ldc0
echo dumpinputtask 0, 0, 2, /mnt > /proc/mi_modules/mi_ldc/mi_ldc0
# dump output task, dis passid=0, chnid需与客户实际场景确认
# echo dumpoutputtask [chnid, passid, cnt, path] > /proc/mi_modules/mi_ldc/mi_ldc0
echo dumpoutputtask 0, 0, 2, /mnt > /proc/mi_modules/mi_ldc/mi_ldc0
STEP2: 若dump 出来的输入已经花屏
可排除MI_LDC的问题,可使用前级的dump命令来进行定位具体模块;
STEP3: 若dump 出来的输入无花屏而输出花屏
可确定是MI_LDC的问题,可将dump的 输入和输出与场景 提供给模块owner进行分析;
STEP4: 若dump 出来的输入输出无花屏
可排除MI_LDC的问题,可使用后级的dump命令来进行定位具体模块;
3.5 无防抖效果 或 防抖效果不佳¶
该问题可先通过如下的方向进行分析确认,若依旧无效果或无排查方向,可提供如下完整信息给模块owner进行分析:
-
录制最终的效果视频;
-
记录运行时的完整log,包括串口和telnet端;
-
场景说明(如pipeline、通过MI_LDC接口所设定DIS-GME模式的参数(该参数可通过运行时执行cat /proc/mi_module/mi_ldc/mi_ldc0获取))。
3.5.1 排查方向¶
STEP1: 查看输入视频质量和场景
| 现象 | 可能的原因及解决办法 |
|---|---|
| 输出视频有拖影闪烁 | 逐帧检查输入的视频是否存在运动模糊,如果有运动模糊需要调IQ消除运动模糊 |
| 输出视频不防抖或有扭曲 | 1. 查看输入视频中的场景是否缺少特征(极低照度、大物体遮挡等原因均有可能导致缺少特征) 2. 查看输入视频中前景和背景是否具有明显深度差异(大视差) 3. 查看输入的抖动视频中是否有大运动前景 4. 查看输入的视频是否有明显rolling shutter |
STEP2: 查看镜头是否有明显的畸变
视频畸变对DIS效果也存在影响,建议使用畸变尽量小的镜头,或进行畸变校正,以消除视频畸变对DIS效果的影响。如下图所示为畸变校正前后:

畸变的视频帧 |
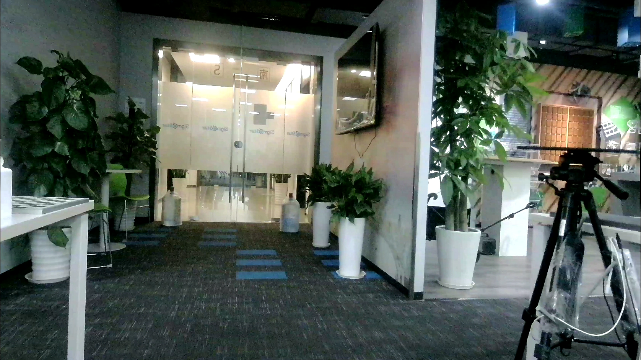
畸变校正后的视频帧 |
STEP3: 查看镜头是否存在较大视差
具有较大视差(即前景和背景具有明显深度差异)的场景,可能会造成DIS输出的视频扭曲。因此,不建议DIS应用在视差大的场景。

视差大的视频帧 |
STEP4: 查看场景是否为低照度场景
在一定的暗光范围内,DIS仍可正常工作。但是在极低照度环境下,DIS会检测不到特征点,导致效果变差。因此,不建议DIS应用在极低照度环境,如下图:

极低照度的视频帧 |
-
注意:
在串流开始时,ISP 模块会收敛,默认会丢掉10张图片,该过程正是从暗到亮的过程,若收敛次数不够,可能也会导致送给DIS模块的图片亮度信息在变化(有可能依旧很暗),如下图:
ISP收敛过程极低照度的视频帧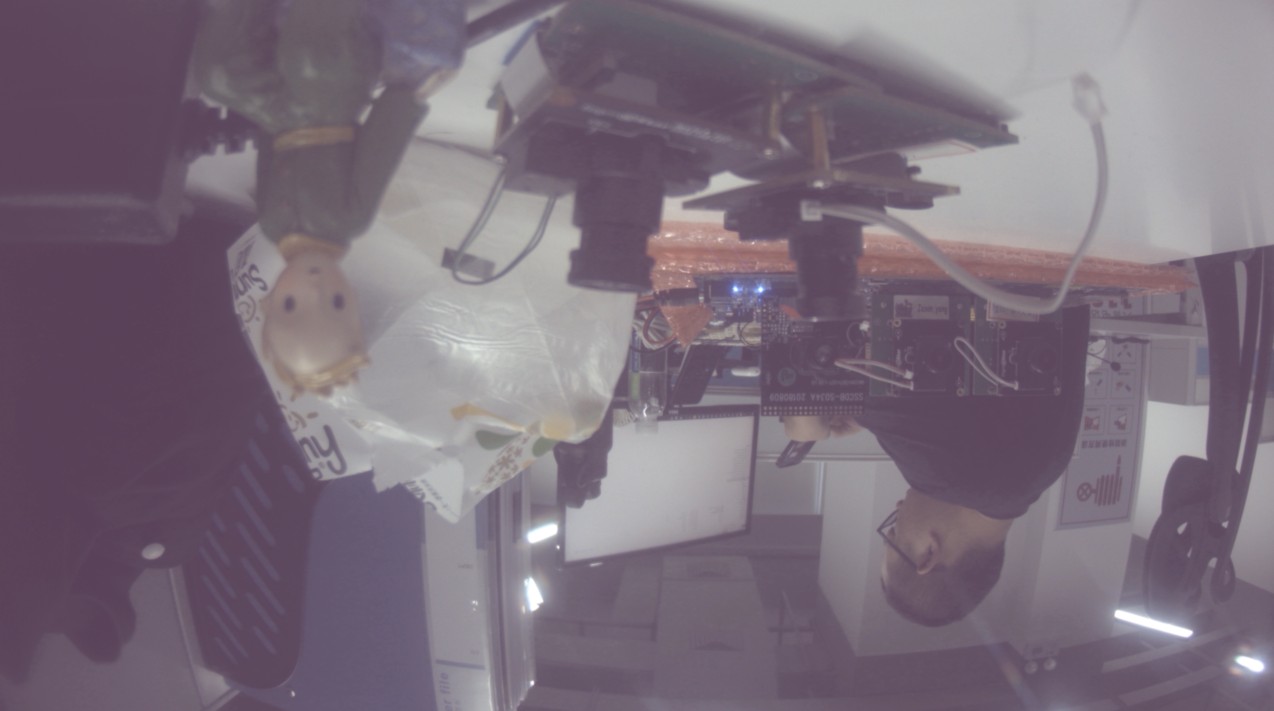
ISP收敛过程低照度的视频帧
4. DIS-GYRO模式常见问题¶
4.1 DIS处理流程卡死¶
在软件处理流程中,负责防抖处理主要逻辑位于DIS PASS(即为MI_LDC模块中pass0)。
4.1.1 现象¶
在发生该情况时,一般会伴随掉帧、无流、刷如下log:
# 情况1:output task卡住
[MI WRN] _MI_SYS_Pass_TryDequeueOutputTaskNoLock[6154]: [thread:ldc0_P0_MAIN] mod[23] dev[0] pass[0] chn[0] output not finished more than 5000ms;
[MI WRN] _MI_SYS_Pass_DebugDumpOutputTaskFence[371]: [0:c71dbe00 0000000d] fence39
# 情况2:input task卡住
[MI WRN] _MI_SYS_Pass_TryDequeueInputTaskNoLock[3325]: [thread:ldc0_P0_MAIN] mod[23] dev[0] pass[0] chn[0] inputtask's fence not finished more than 5000ms;
[MI WRN] _MI_SYS_Pass_TryDequeueInputTaskNoLock[3391]: [thread:ldc0_P0_MAIN] mod[23] dev[0] pass[0] chn[0] inputtask CheckInputTaskStatus failed more than 5000ms,total pending task32;
4.1.2 排查方向¶
STEP1:排查死锁可能性
- 执行echo show_threads > /proc/mi_modules/mi_ldc/mi_ldc0;
- 查看log是否有LDC/DIS字样的API一直在等锁或信号量;
STEP2:排查软件卡住可能性
- 执行echo 7 > /proc/mi_modules/mi_ldc/debug_level;
- 查看ldc log是否存在异常,如重复打印同一句或一种类型的log(处于某种循环);
STEP3:如果上述步骤无法解决
- 将上述步骤的执行log收集提供给模块owner;
- 执行cat /proc/mi_modules/mi_ldc/mi_ldc0,保存log提供给模块owner;
- 说明客户场景,如帧率、分辨率、模块channel使用情况;
4.2 出现Gyro IS NOT Ready的打印¶
4.2.1 现象¶
出现该现象,表示从GYRO外设中拿到的FIFO DATA(GYRO会根据采样率的设定在固定时间间隔中往FIFO BUFFER写入固定的数据量)已经满了:
[Warn]:Gyro not ready!!!!
- 注意:
- 在APP一开始跑起来会刷大概6条该log,此现象为正常,不需要进行下述步骤来排查问题;
- 若发现连续不断刷或间隔时间段刷该log,则需进行排查。
4.2.2 排查方向¶
STEP1:排查是否存在掉帧或帧率过低的情况
由于GYRO会根据采样率的设定在固定时间间隔中往GYRO FIFO BUFFER写入固定的数据量,假设帧率下降太多,来不及从GYRO FIFO BUFFER中取数据,会导致数据堆积。
执行cat /proc/mi_modules/mi_ldc/mi_ldc0,查看此时MI_LDC的整体帧率,如下图:

|
STEP2:排查是否由于杜邦线连接松动导致传输得到的数据为默认最大值
重新拔插杜邦线,再跑APP尝试;
STEP3:如果上述步骤无法解决
- 将上述步骤的执行log收集提供给模块owner;
- 执行cat /proc/mi_modules/mi_ldc/mi_ldc0,保存log提供给模块owner;
- 说明客户场景,如帧率、分辨率、模块channel使用情况;
4.3 出现GYRO_IOC_CMD_xxxxxxx fail打印¶
4.3.1 现象¶
在发生该种情况时,一般会伴随着无流、刷如下log:
# 情况1:获取加速度传感器信息fail
[MI ERR ]: _LDC_DISALGO_GYRO_Register[102]: {GYRO_IOC_CMD_GET_ACCEL_SENSITIVIVT} fail, ret:-1
[MI ERR ]: _LDC_DISALGO_GYRO_Register[102]: Gyro Get Sensitivity Fail
4.3.2 排查方向¶
STEP1:排查是否是杜邦线连接错误导致
检查GYRO的杜邦线连接。由于客户所使用的GYRO Sensor板与Chip Board可能与公版不一致,故需与客户确认,最好拿到GYRO Sensor的原理图与实际板端连线图进行确认。
STEP2:排查是否为杜邦线本身就存在断路或脱焊
- 可尝试更换杜邦线后重新运行,或使用万用表测试杜邦线的导通情况;
- 可尝试加焊后重新运行;
- 连接LA(逻辑分析仪),查看波形。
STEP3:如果上述步骤无法解决
-
将上述步骤的执行log收集提供给模块owner;
-
将客户的dts配置、gyro型号与gyro移植代码提供给模块owner;
-
如果可以,可将整个设备寄送给模块owner分析;
4.4 花屏¶
4.4.1 现象¶
出现该问题时,一般从rtsp拉流可看到画面出现黑边、绿条等现象。
4.4.2 排查方向¶
STEP1: dump MI_LDC的输入和输出,确认是否有问题
# dump input task,dis passid=0
# echo dumpinputtask [chnid, passid, cnt, path] > /proc/mi_modules/mi_ldc/mi_ldc0
echo dumpinputtask 0, 0, 2, /mnt > /proc/mi_modules/mi_ldc/mi_ldc0
# dump output task
# echo dumpoutputtask [chnid, passid, cnt, path] > /proc/mi_modules/mi_ldc/mi_ldc0
echo dumpoutputtask 0, 0, 2, /mnt > /proc/mi_modules/mi_ldc/mi_ldc0
STEP2: 若dump 出来的输入已经花屏
可排除MI_LDC的问题,可使用前级的dump命令来进行定位具体模块;
STEP3: 若dump 出来的输入无花屏而输出花屏
可确定是MI_LDC的问题,可将dump的**输入和输出与场景**提供给模块owner进行分析;
STEP4: 若dump 出来的输入输出无花屏
可排除MI_LDC的问题,可使用后级的dump命令来进行定位具体模块;
4.5 无防抖效果 或 防抖效果不佳¶
4.5.1 排查方向¶
该问题可先通过如下的方向进行分析确认,若依旧无效果或无排查方向,可提供如下完整信息给模块owner进行分析:
-
录制最终的效果视频;
-
记录运行时的完整log,包括串口和telnet端;
-
场景说明(如pipeline、通过MI_LDC接口所设定DIS-GYRO模式的参数(该参数可通过运行时执行cat /proc/mi_module/mi_ldc/mi_ldc0获取))。
STEP1: 查看GYRO外设是否正常功能
查看串口/telnet是否有下述问题中的打印:
STEP2: 查看DISAttr的参数设定是否符合要求
可打开[IS用户指南]查看 as32RotationMatrix、 u32FocalLengthX与u32FocalLengthY 参数设定是否符合规则。
4.6 算法错误log排查¶
出现算法错误log,优先按对应log的章节进行排查,若按对应章节内容分析无果,可按如下统一步骤分析:
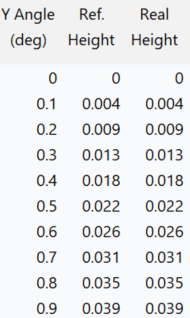
STEP1: 排查镜头和Image Sensor与实际配置不对应的可能性
- 参考[IS用户指南]查看 u32FocalLengthX与u32FocalLengthY 参数设定是否符合规则;
- 检查**s32FisheyeRadius**参数是否符合此计算规则(广角镜头):s32FisheyeRadius = (sqrt(active_full_size_width^2 + active_full_size_height^2))/2;
- 检查标定文件Lenspec.dat的参数是否与实际使用镜头一致,检查方法:

|
| ||||||||||||||||||
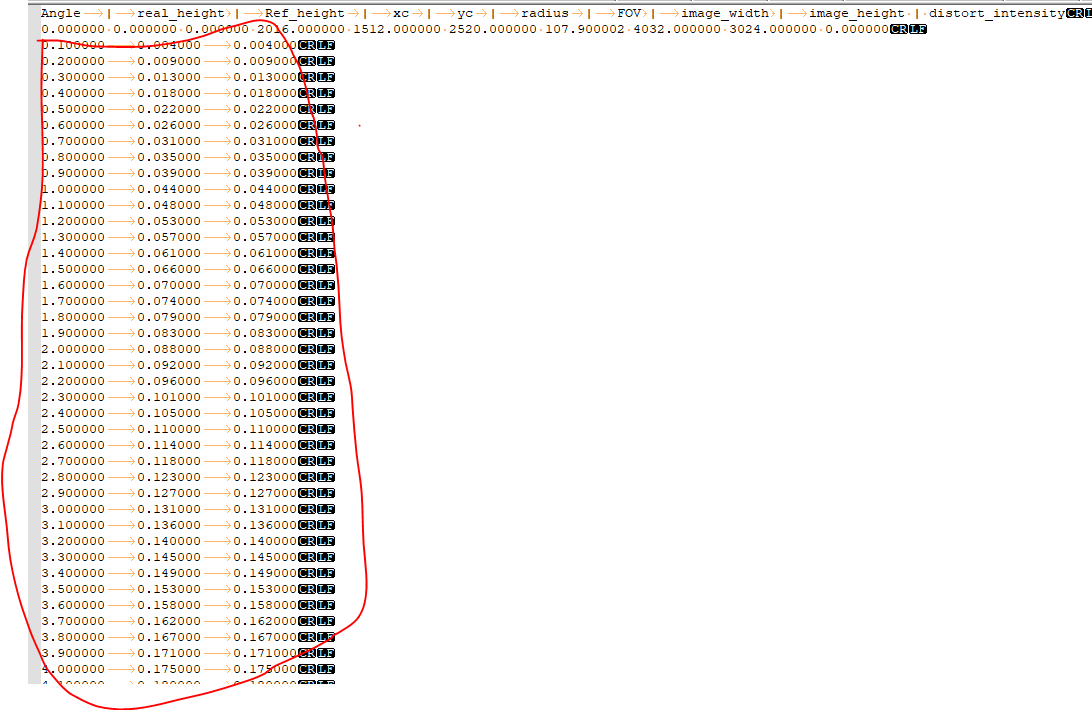
|
|


STEP2:如果上述步骤无法解决
提供如下资料给owner分析。
- 官方手册:镜头的Spec file和Image Sensor的Datasheet;
- 标定相关文件:Lenspec.dat以及CalibPoly_new.bin;
- 出问题时配置的参数值:MI_LDC_ChnDISAttr_t与MI_LDC_ChnLDCAttr_t;
- 出问题时的log:若问题出现在调用MI_LDC_StartChannel前,则如下b的log无需提供 a. proc信息:运行时执行cat /proc/mi_modules/mi_ldc/mi_ldcX, X为devid; b. 算法log:在调用MI_LDC_StartChannel后执行echo calib_loglv chn_id 18 > /proc/mi_modules/mi_ldc/mi_ldcX,chn_id与X按实际场景配置; c. APP运行log:执行echo 7 > /proc/mi_modules/mi_ldc/debug_level抓取。
4.6.1 出现distor_intensity is too strong的算法log¶
4.6.1.1 现象¶
在发生该种情况时,一般会伴随着一开始参数配置失败断流或动态调整参数失败的情况。完整错误log如下:
distor_intensity is too strong and cannot be suppored, please reduce !!!
ERR func: xxxxxx
4.6.1.2 排查方向¶
STEP1: 排查畸变矫正强度过大可能性
上述log表示畸变矫正时,算法对多个参数进行综合性判断发现当前的矫正强度过大无法支持,故可优先降低s32DistortionRatio参数值。
- 确认此时s32DistortionRatio参数是否为零,若为零则不需进入2调整,直接进行STEP2;
- 将s32DistortionRatio参数按步进值1或2逐步降低进行配置;
STEP2: 其他排查方法
按统一步骤进行排查。
4.6.2 出现Undistortion ratio error的算法log¶
4.6.2.1 现象¶
在发生该种情况时,一般会伴随着一开始参数配置失败断流或动态调整参数失败的情况。完整错误log如下:
Undistortion ratio error, please check binning ratio
[MI ERR]: xxxx
4.6.2.2 排查方向¶
STEP1: 排查SensorDriver的binning_mode参数配置错误的可能性
上述log表示畸变率与实际sensor不符合,需检查binnig参数配置。
- 检查对应的SensorDriver中resolution的binnig_mode是否与datasheet一致,如使用的2x2的binning mode,则对应resolution的binnning_mode配置为CUS_SEN_BINNING_2x2。
STEP2: 其他排查方法
上述STEP确认后依旧有问题,按统一步骤进行排查。
4.6.3 出现init flow error的算法log¶
4.6.3.1 现象¶
在发生该种情况时,一般会伴随着一开始参数配置失败断流或动态调整参数失败的情况。完整错误log如下:
ERROR: init flow error, please call the get_boundary_function first !!!
[MI ERR]: xxxx
4.6.3.2 排查方向¶
STEP1: 直接按统一方法排查
按统一步骤进行排查。
4.6.4 出现Crop initialization not centered per spec的算法log¶
4.6.4.1 现象¶
在发生该种情况时,一般会伴随一开始参数配置失败断流。完整错误log如下:
[eis_algo_crop_size_check] Crop initialization not centered per spec. sensor height: x
[MI ERR]: xxxx
4.6.4.2 排查方向¶
STEP1: 排查SensorDriver对应resolution是否居中裁剪
上述log表示根据SensorDriver的参数计算出目前图像在sensor crop时未居中裁剪,需检查对应配置。
- 检查对应resolution是否有正确居中裁剪,若无请与厂商调整SensorDriver驱动,进行居中裁剪,若有则进行下一步;
- 确认Sensor Crop为居中后,检查对应SensorDriver的w_x、h_y、ori_w以及ori_h是否按[IS用户指南]的要求进行配置。
STEP2: 其他排查方法
上述STEP确认后依旧有问题,按统一步骤的STEP2进行排查。