点sensor程序说明¶
1. sensor图像显示功能介绍¶

该demo 主要展示了从Sensor到RTSP 整条Pipeline该如何串接, 如上图所示,具体支持如下功能:
-
功能场景:sensor采集到的视频显示到RTSP上
-
视频流:sensor->vif->isp->scl->venc->rtsp
-
支持配置双摄
-
支持配置iqbin的路径
2. 编译环境说明¶
Note
一般默认板端已经打包好了相应程序,因此sample_code程序编译并非必须。你可以直接在板端/customer/sample_code/bin文件夹中找到prog_vif_sensor_demo。如果你没有找到文件或有自己修改程序的需求,可参考如下步骤。
-
如果没有找到
prog_vif_sensor_demo,可以查看\sdk\verify\sample_code\source\iford\vif\sensor_demo\sensor_demo.mk内是否包含APP_REL_PREFIX:= bin,如果没有,可以在sensor_demo.mk补上,这样就会在编译project时一同打包到image中; -
在project路径下根据板子(nand/nor,ddr型号等)选择defconfig进行整包编译
例如Comake PI D2型号板子,使用emmc,ddr4的配置,使用以下defconfig,其他板子型号详细参考用户手册
ipc_iford.emmc.glibc-11.1.0-ext4fs.ssc029d.256.bga8_lpddr4x_d2_full_defconfig在project目录执行以下命令进行编译;
export PATH=/tools/toolchain/gcc-sigmastar-9.1.0-2019.11-x86_64_arm-eabi/bin:/tools/toolchain/gcc-11.1.0-20210608-sigmastar-glibc-x86_64_arm-linux-gnueabihf/bin:$PATHexport CROSS_COMPILE=arm-linux-gnueabihf-export ARCH=armmake ipc_iford.emmc.glibc-11.1.0-ext4fs.ssc029d.256.bga8_lpddr4x_d2_full_defconfigmake clean && make image -j8 -
如有修改程序的需求,可以cd进到
sdk/verify/sample_code目录执行make clean && make source/iford/vif/sensor_demo进行编译; -
到
sample_code/out/arm/app/prog_vif_sensor_demo获取可执行文件; -
将可执行文件
prog_vif_sensor_demo放到板子/customer/sample_code/bin路径上,修改权限777。
3. 运行环境说明¶
3.1 单sensor运行环境说明¶
-
板端环境
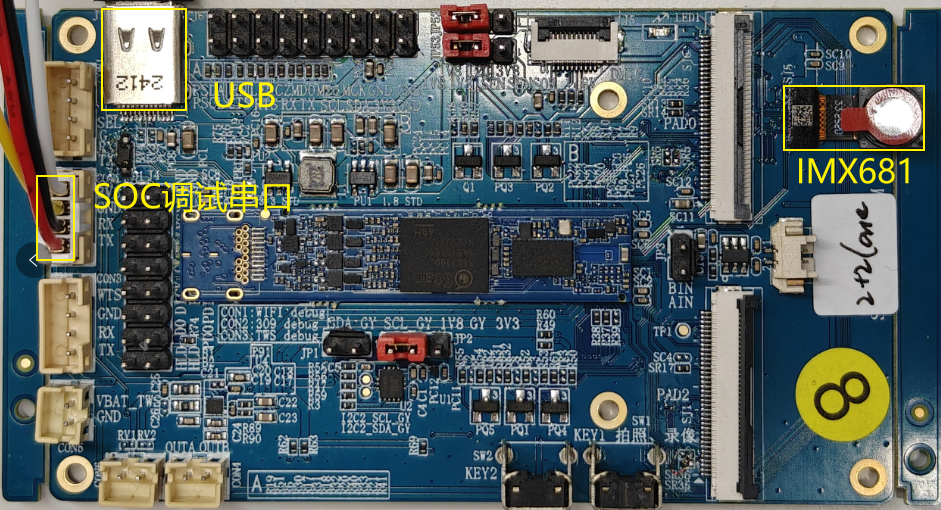
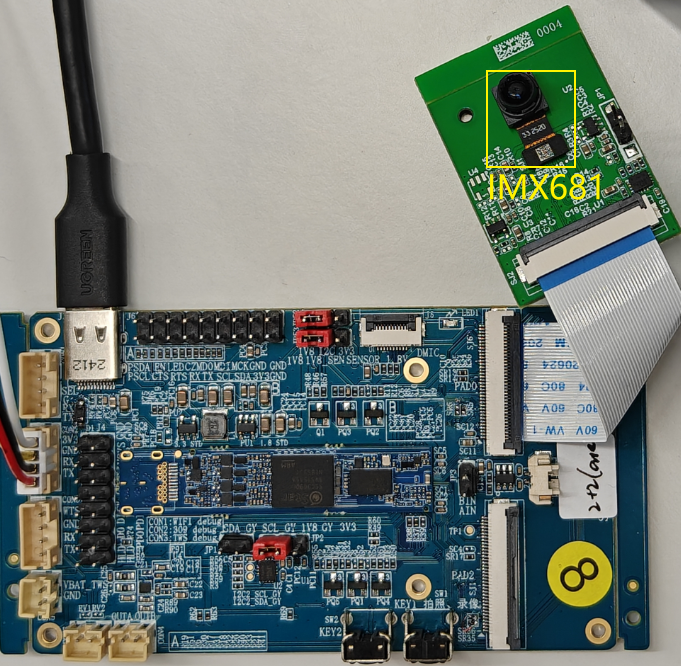
单Sensor有两种接法,一种是默认SJ5 IMX681 SENSOR,另外一种是SJ6接 IMX681 SENSOR,使用SJ6/SJ1需要改动硬件,详情参考 Comake Pi D2 硬件说明 中3.15 MIPI01 PAD2 2LANE接口(SJ1)的说明。
SJ5连接Sensor如下图所示
SJ6连接Sensor如下图所示
-
dts配置:
mipi snr0 2lane 开发板上使用,使用D2 full对应的defconfig的情况下,默认dts已配好,无需修改
-
sensor 驱动配置:
/customer/demo.sh路径修改insmod对应的sensor ko,例如imx681 sensor时,可配置为:
insmod /config/modules/5.10/imx681_MIPI.ko chmap=1(跑单sensor)
3.2 双sensor运行环境说明¶
-
板端环境
双Sensor连接需要SJ1/SJ5/SJ6,可以选择SJ5-SJ1组合,或者SJ6-SJ1组合,其中SJ6-SJ1组合还需要改动硬件。详情参考 Comake Pi D2 硬件说明 中3.15 MIPI01 PAD2 2LANE接口(SJ1)的说明。
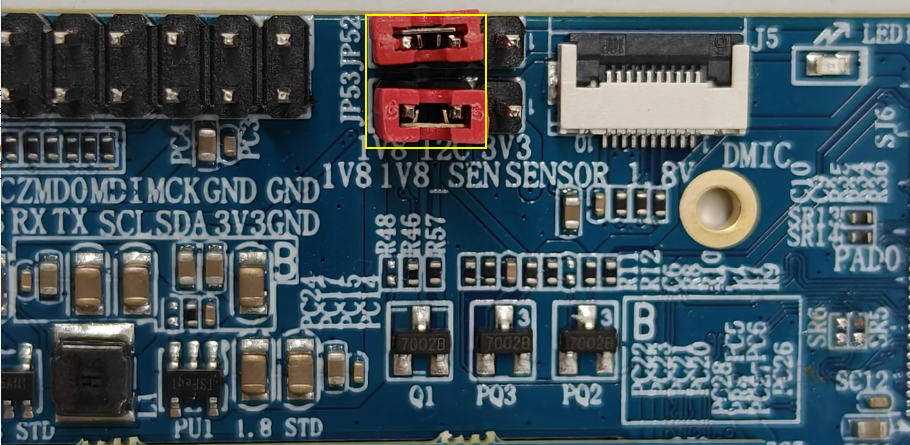
同时为了稳定帧率,如1080P60,需要扩展板给Pad2(sensor2)供电,如下图JP53所示
SJ5-SJ1连接Sensor如下如所示

SJ6-SJ1连接Sensor如下如所示
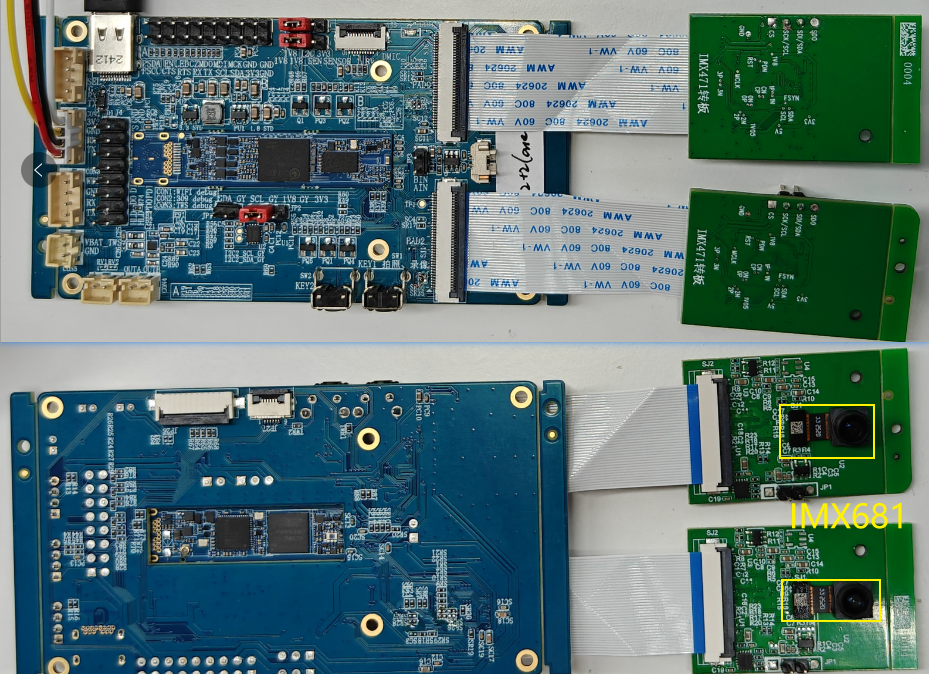
注意 MIPI排线不能接反,否则会烧坏Sensor
-
dts配置:
确认
\kernel\arch\arm\boot\dts\iford-ssz029d-s01a-d2-full-camdriver.dtsi文件的dts配置:csi: csi { compatible = "sstar,csi"; io_phy_addr = <0x1f000000>; banks = <0x153C>,<0x153D>,<0x153E>,<0x1538>,<0x153A>,<0x153B>; atop_banks = <0x153F>; clkgen_banks = <0x1038>; interrupts= <GIC_SPI INT_IRQ_MIPI_CSI2 IRQ_TYPE_LEVEL_HIGH>; clocks = <&CLK_csi0_mac_lptx_top_i>, <&CLK_csi0_mac_top_i>, <&CLK_csi0_ns_top_i>, <&CLK_csi1_mac_lptx_top_i>, <&CLK_csi1_mac_top_i>, <&CLK_csi1_ns_top_i>; status = "ok"; /* Config max lane number */ csi_sr0_lane_num = <2>; csi_sr2_lane_num = <2>; /* Config lane selection */ csi_sr0_lane_select = <2 1 0 3 4>; csi_sr2_lane_select = <2 1 0>; /* Config lane P/N swap */ csi_sr0_lane_pn_swap = <0 0 0 0 0>; csi_sr2_lane_pn_swap = <0 0 0>; }; sensorif: sensorif { compatible = "sstar,sensorif"; clocks = <&CLK_sr00_mclk>, <&CLK_sr01_mclk>; snr0_mipi_i2c = <1>; snr2_mipi_i2c = <2>; /* Config sensor 0 pad mux */ snr_sr0_mipi_mode = <5>; snr_sr0_mipi_rst_mode = <1>; snr_sr0_rst_pol = <1>; snr_sr0_mipi_pdn_mode = <0>; snr_sr0_mipi_mclk_mode = <1>; snr_sr0_rst_gpio = <PAD_SR_RST0>; /* Config sensor 2 pad mux */ snr_sr2_mipi_mode = <5>; snr_sr2_mipi_rst_mode = <1>; snr_sr2_rst_pol = <1>; snr_sr2_mipi_pdn_mode = <0>; snr_sr2_mipi_mclk_mode = <1>; snr_sr2_rst_gpio = <PAD_SR_RST1>; /* Config mclk 37.125MHz supported */ vif_sr0_mclk_37p125 = <1>; vif_sr2_mclk_37p125 = <1>; /*config mipi pwm */ snr_ds_rt_snr_pad = <0 2>; snr_ds_rt_pwm_sync = <0>; snr_ds_rt_pwm_pin = <8>; snr_ds_rt_pwm_sr0_pol = <0>; snr_ds_rt_pwm_sr1_pol = <1>; snr_ds_rt_pwm_cycle = <60>; };mipi snr0+snr1 2+2lane 开发板上使用,使用D2 full对应的defconfig的情况下,默认dts已配好,无需修改。如需使用 pwm 双sensor,只需要将 snr_ds_rt_pwm_sync 设置为 1 即可。
-
sensor 驱动配置:
/customer/demo.sh路径修改insmod对应的sensor ko,例如imx681 sensor时,可配置为:
insmod /config/modules/5.10/imx681_MIPI.ko chmap=5(跑双sensor)
4. 运行说明¶
cd到板端/customer/sample_code/bin路径,运行prog_vif_sensor_demo
prog_vif_sensor_demo cmdIndex index xx iqbin xx realtime xx 3drn xx calidata xx q
参数解释如下:
| 参数说明 | 功能 | 备注 |
|---|---|---|
| cmdIndex | 启用的sensor | 0:单摄,1:双摄 |
| index | 选择sensor的分辨率 | 不输入该参数,程序会自动输出目前所有分辨率进行选择 |
| iqbin | 加载iqbin的路径 | 板端默认存放路径:/config/iqfile/ |
| 3dnr | 是否开启3dnr | 0:关闭,1:开 |
| realtime | 是否启用realtime mode | 0:frame mode(默认),1:real time mode,注意:双路下开realtime仅支持pwm控制双slave,需修改dts,可参考3.2 dts配置内容,分辨率仅支持带有 slave_pwm_low与slave_pwm_high |
| calidata | 加载calidata路径 | 板端默认存放路径:/config/iqfile/ |
| q | 开启iq server功能 | 详情可参考ISP API Tuning SOP |
-
index + sensorIndex
执行
./prog_vif_sensor_demo 0 index 1第一个参数选择单sensor,第二个参数index,则第三个参数输入为选择sensorIndex,范围是0-13,resolution列表参考执行实例下表,index0/index5为picture格式,VENC暂不支持这两种resource stream,index11/index12为pwm双sensor选择,需修改dts打开开关index 0, Crop(0,0,4032,3024), outputsize(4032,3024), maxfps 15, minfps 3, ResDesc 4032x3024@15fps index 1, Crop(0,0,3840,2160), outputsize(3840,2160), maxfps 21, minfps 3, ResDesc 3840x2160@21fps index 2, Crop(0,0,2016,1512), outputsize(2016,1512), maxfps 30, minfps 3, ResDesc 2016x1512@30fps index 3, Crop(0,0,1920,1080), outputsize(1920,1080), maxfps 30, minfps 3, ResDesc 1920x1080@30fps index 4, Crop(0,0,3264,2448), outputsize(3264,2448), maxfps 30, minfps 3, ResDesc 3264x2448@30fps index 5, Crop(0,0,4032,3024), outputsize(4032,3024), maxfps 30, minfps 3, ResDesc 4032x3024@30fps index 6, Crop(0,0,3840,2160), outputsize(3840,2160), maxfps 30, minfps 3, ResDesc 3840x2160@30fps index 7, Crop(0,0,1920,1080), outputsize(1920,1080), maxfps 60, minfps 3, ResDesc 1920x1080@60fps index 8, Crop(0,0,1008,756), outputsize(1008,756), maxfps 200, minfps 3, ResDesc 1008x756@200fps index 9, Crop(0,0,2560,1440), outputsize(2560,1440), maxfps 30, minfps 3, ResDesc 2560x1440@30fps index 10, Crop(0,0,1920,1080), outputsize(1920,1080), maxfps 60, minfps 3, ResDesc 1920x1080@60fps_master_xvs index 11, Crop(0,0,1920,1080), outputsize(1920,1080), maxfps 60, minfps 3, ResDesc 1920x1080@60fps_slave_pwm_low index 12, Crop(0,0,1920,1080), outputsize(1920,1080), maxfps 60, minfps 3, ResDesc 1920x1080@60fps_slave_pwm_high choice which resolution use, cnt 13 -
iqbin + iqBinPath
执行
./prog_vif_sensor_demo 0 iqbin /config/iqfile/imx681_3m_comake_1201_30fps.bin第一个参数选择单sensor场景,第二个参数iqbin,则第三个参数输入为iqbin的文件路径。
注意
选择IQ BIN的时候请注意参考下表与分辨率对应。
| 分辨率 | IQ File | calidata | 注意 |
|---|---|---|---|
| 4032x3024@15fps | NA | NA | 不支持 |
| 3840x2160@21fps | imx681_8m_comake_1201_30fps.bin | 12m_ne_cali.data | NA |
| 2016x1512@30fps | imx681_3m_comake_1201_30fps.bin | 3m_ne_cali.data | NA |
| 3264x2448@30fps | imx681_8m_comake_1201_30fps.bin | 12m_ne_cali.data | NA |
| 4032x3024@30fps | NA | NA | 不支持 |
| 3840x2160@30fps | imx681_8m_comake_1201_30fps.bin | 12m_ne_cali.data | NA |
| 1920x1080@60fps | imx681_2m_comake_1201_60fps.bin | 3m_ne_cali.data | NA |
| 1920x1080@30fps | imx681_2m_comake_1201_30fps.bin | 3m_ne_cali.data | NA |
| 1920x1080@60fps_slave_pwm_low | imx681_2m_comake_1201_60fps_8ms.bin | 3m_ne_cali.data | 需开启realtime,修改dts |
| 1920x1080@60fps_slave_pwm_high | imx681_2m_comake_1201_60fps_8ms.bin | 3m_ne_cali.data | 需开启realtime,修改dts |
执行示例
-
配置USB为rndis网卡,cd到
/customer/sample_code/bin/resource,运行./setup_rndis.sh,默认会拉起usb0网卡,输入ifconfig会出现以下log:usb0 Link encap:Ethernet HWaddr E6:46:AC:2F:77:56 inet addr:192.168.7.2 Bcast:192.168.7.255 Mask:255.255.255.0 UP BROADCAST RUNNING MULTICAST MTU:1500 Metric:1 RX packets:48 errors:0 dropped:31 overruns:0 frame:0 TX packets:0 errors:0 dropped:0 overruns:0 carrier:0 collisions:0 txqueuelen:1000 RX bytes:3400 (3.3 KiB) TX bytes:0 (0.0 B)此时PC端会枚举出一个虚拟的RNDIS网卡,可以通过“右键->开始->设备管理器->网络适配器查看,通常名字为
USB Ethernet/RNDIS Gadget,如果没有该设备可能电脑没有安装RNDIS驱动,可以参考链接第四章进行安装:https://dev.comake.online/home/article/7672 -
运行单sensor示例:
./prog_vif_sensor_demo 0 index 3 iqbin /config/iqfile/imx681_3m_comake_1201_30fps.bin 3dnr 1 calidata /config/iqfile/3m_ne_cali.data运行双sensor示例:
./prog_vif_sensor_demo 1 index 3 iqbin /config/iqfile/imx681_3m_comake_1201_30fps.bin 3dnr 1 calidata /config/iqfile/3m_ne_cali.data运行pwm 双sensor示例:
./prog_vif_sensor_demo 1 realtime 1 iqbin /config/iqfile/imx681_2m_comake_1201_60fps_8ms.bin 3dnr 1 calidata /config/iqfile/3m_ne_cali.data运行demo后,如果prog_vif_sensor_demo不带index + sensorIndex会打印sensor可选择输入的res,输入你想选择preview的res(sensor resolution),例如imx618sensor,会打印以下log:
index 0, Crop(0,0,4032,3024), outputsize(4032,3024), maxfps 15, minfps 3, ResDesc 4032x3024@15fps index 1, Crop(0,0,3840,2160), outputsize(3840,2160), maxfps 21, minfps 3, ResDesc 3840x2160@21fps index 2, Crop(0,0,2016,1512), outputsize(2016,1512), maxfps 30, minfps 3, ResDesc 2016x1512@30fps index 3, Crop(0,0,1920,1080), outputsize(1920,1080), maxfps 30, minfps 3, ResDesc 1920x1080@30fps index 4, Crop(0,0,3264,2448), outputsize(3264,2448), maxfps 30, minfps 3, ResDesc 3264x2448@30fps index 5, Crop(0,0,4032,3024), outputsize(4032,3024), maxfps 30, minfps 3, ResDesc 4032x3024@30fps index 6, Crop(0,0,3840,2160), outputsize(3840,2160), maxfps 30, minfps 3, ResDesc 3840x2160@30fps index 7, Crop(0,0,1920,1080), outputsize(1920,1080), maxfps 60, minfps 3, ResDesc 1920x1080@60fps index 8, Crop(0,0,1008,756), outputsize(1008,756), maxfps 200, minfps 3, ResDesc 1008x756@200fps index 9, Crop(0,0,2560,1440), outputsize(2560,1440), maxfps 30, minfps 3, ResDesc 2560x1440@30fps index 10, Crop(0,0,1920,1080), outputsize(1920,1080), maxfps 60, minfps 3, ResDesc 1920x1080@60fps_master_xvs index 11, Crop(0,0,1920,1080), outputsize(1920,1080), maxfps 60, minfps 3, ResDesc 1920x1080@60fps_slave_pwm_low index 12, Crop(0,0,1920,1080), outputsize(1920,1080), maxfps 60, minfps 3, ResDesc 1920x1080@60fps_slave_pwm_high choice which resolution use, cnt 13- 注意同一型号sensor,跑两路流,请输入同一个res index,pwm 双 slave模式下,分别选择 index 11 与 index 12
5. 运行结果说明¶
-
preview 单sensor效果查看
正常出流会打印rtsp url,单sensor打印一个url,双sensor打印两个url,例如以下log:
使用vlc media player 或 potplayer 等视频播放软件,以打开链接方式播放,播放成功可看到sensor画面。
=================URL=================== rtsp://192.168.7.2/6600 =================URL=================== Create Rtsp H265 Session, FPS: 30
-
双sensor效果查看
=================URL=================== rtsp://192.168.7.2/6600 =================URL=================== Create Rtsp H265 Session, FPS: 60 (ST_DualSensorPipline_Preview 467)exec function pass rtsp venc dev0, chn 1, type 3, url 6601 video width: 1920, height: 1080, Max buf size: 0xfd200 =================URL=================== rtsp://192.168.7.2:555/6601 =================URL=================== Create Rtsp H265 Session, FPS: 60
-
退出命令
输入
q即可退出demo,退出sensor0拍摄画面,显示黑色。