Capture_DebugSop
REVISION HISTORY¶
| Revision No. | Description |
Date |
|---|---|---|
| 1.0 | 12/13/2024 |
问题一:Capture无数据¶
1. Capture无数据的Debug流程图¶
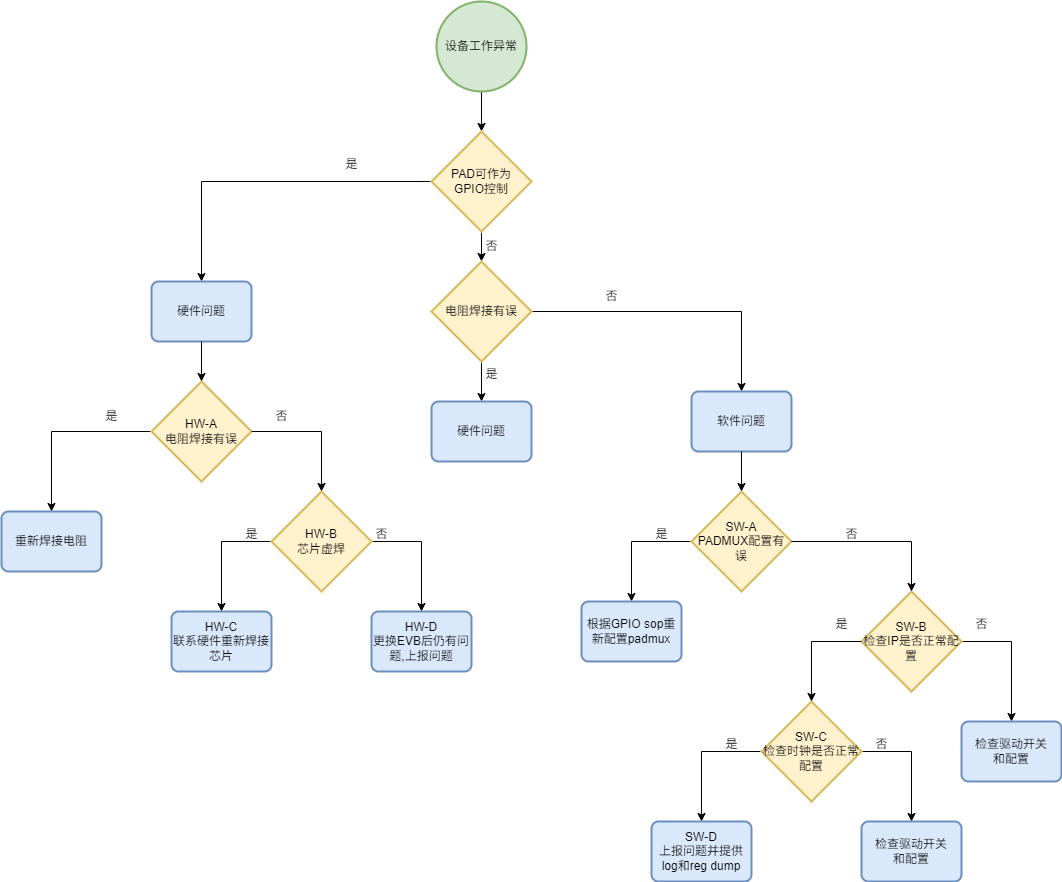
2. Capture无数据的Debug流程说明¶
2.1 硬件问题¶
检查到Capture无数据时,可操作寄存器将对应PIN脚设为GPIO并拉高拉低(请注意某些PIN脚GPIO功能优先级并不是最高的,此时需要先清除更高优先级),如果实际输出电平没有变化,则可判断为硬件问题,可按照如下顺序排查:
2.1.1 HW-A 检查电阻¶
查看原理图的对应PIN脚是否有电阻漏焊/虚焊,漏焊则需要补焊电阻,否则PIN脚不通
2.1.2 HW-B 检查焊接情况¶
如果更换Board后,GPIO是可以拉高拉低的,那么可能是芯片虚焊,需要rework
2.1.3 HW-C 请求协助¶
联系硬件同事协助排查并重焊芯片
2.1.4 HW-D 缺陷上报¶
如果更换Board后,GPIO仍然无法拉高拉低,联系SW Owner上报缺陷
2.2 软件问题¶
2.2.1 步骤SW-A 检查PADMUX¶
-
检查PADMUX是否存在冲突
-
检查padmux是否使能,以pcupid为例,Capture的padmux配置需要根据选择的引脚在对应的
arch/arm64/boot/dts/sstar/chipname-xxx-padmux.dtsi中加入如下所示的内容,请确认
<PAD_OUTP_CH0 PINMUX_FOR_PWMIN0_MODE_1 MDRV_PUSE_PWMIN0>, <PAD_OUTN_CH0 PINMUX_FOR_PWMIN1_MODE_1 MDRV_PUSE_PWMIN1>, <PAD_OUTP_CH1 PINMUX_FOR_PWMIN2_MODE_1 MDRV_PUSE_PWMIN2>, <PAD_OUTN_CH1 PINMUX_FOR_PWMIN3_MODE_1 MDRV_PUSE_PWMIN3>, <PAD_OUTP_CH2 PINMUX_FOR_PWMIN4_MODE_1 MDRV_PUSE_PWMIN4>, <PAD_OUTN_CH2 PINMUX_FOR_PWMIN5_MODE_1 MDRV_PUSE_PWMIN5>, <PAD_OUTP_CH3 PINMUX_FOR_PWMIN6_MODE_1 MDRV_PUSE_PWMIN6>, <PAD_OUTN_CH3 PINMUX_FOR_PWMIN7_MODE_1 MDRV_PUSE_PWMIN7>, <PAD_GPIOE_10 PINMUX_FOR_PWMIN8_MODE_3 MDRV_PUSE_PWMIN8>, <PAD_GPIOD_00 PINMUX_FOR_PWMIN9_MODE_2 MDRV_PUSE_PWMIN9>, <PAD_GPIOE_14 PINMUX_FOR_PWMIN10_MODE_3 MDRV_PUSE_PWMIN10>, <PAD_GPIOE_16 PINMUX_FOR_PWMIN11_MODE_3 MDRV_PUSE_PWMIN11>,
2.2.2 步骤SW-B 检查Capture初始化情况¶
dump Capture bank,可通过寄存器状态判断Capture是否已完成初始化,主要查看0x1B数值是否不为0x00
Capture处于未初始化时Bank信息如下:
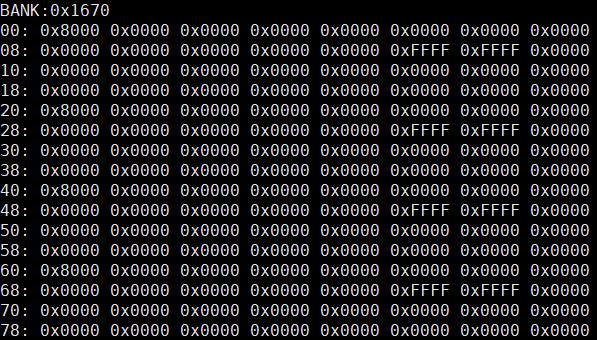
Capture已完成初始化后Bank信息如下:
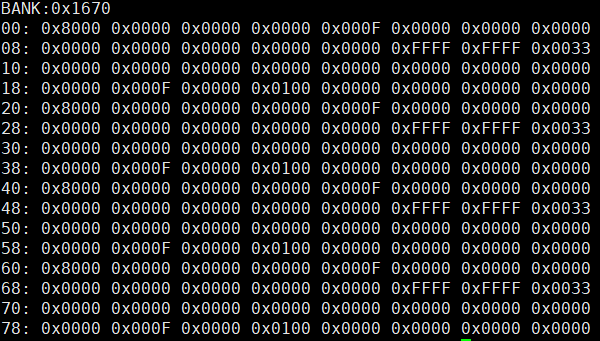
如若未完成初始化,自然无法获取数据,请检查config及DTS配置是否有加载相应Capture驱动
Linux config:
Device Drivers --->
SStar SoC platform drivers --->
<*> Sstar Capture driver
Linux DTS:
capture0: capture@1f2ce000 {
compatible = "sstar,capture";
reg = <0x0 0x1F2CE000 0x0 0x80>;
......
status = "ok"; //ok:初始化Capture
};
.....
2.2.3 步骤SW-C 检查使用方法¶
检查Capture使用方法是否正确,详见使用文档Capture使用参考,常见的使用错误如下:
-
错误地选择成方向模式且配置错方向判断通道的 模式下,特定channel被设置成方向channel时只能用于判断脉冲方向,无法具体捕获波形
-
PWM波形频率较小 Capture在一段时间内没有捕获到电平变化,会自动关闭,若需捕获频率较小的波形,需要在sysfs capture/capture*/timeout 中设置合适的超时时间
2.2.4 步骤SW-D 请求协助¶
上述步骤SW-A,SW-B均检查OK,请提供Capture相关LOG以及Capture BANK 0x1670,0x167c信息给对应FAE
3. 常见问题说明¶
-
无法设置为方向计数模式
- 仅pcupid支持该功能
- 仅有前4组channel支持方向计数模式,每组的两个channel 一个作为脉冲计数,一个作为方向判断
-
无法设置为正交编码器模式
- 仅pcupid支持该功能
- 同方向模式,仅前四组channel支持该功能