YOLOv8-seg
1 概述¶
1.1 背景介绍¶
实例分割比目标检测更进一步, 不仅能够检测出图像中的单个物体的坐标, 并且能够生成单个目标的分割掩码, 将它们与图像的其他内容分割开来。
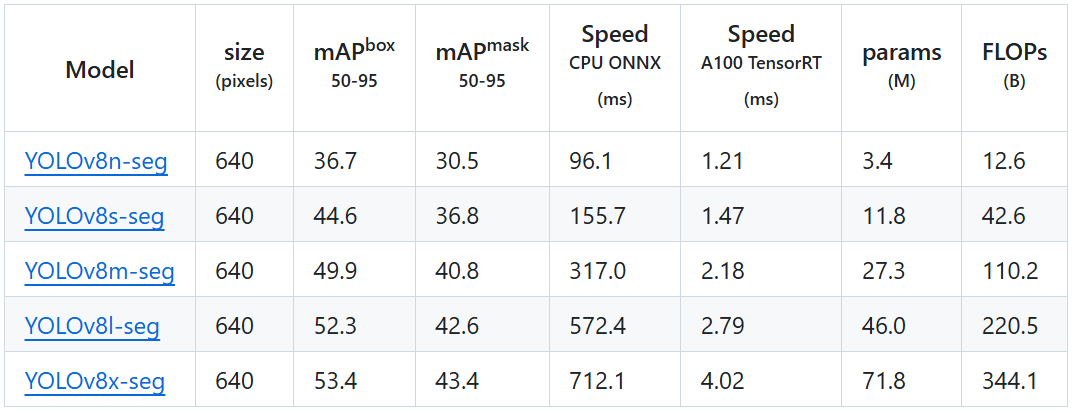
yolov8-seg是一种先进的实例分割模型, 在YOLOv8的基础上增加了实例分割功能, 它继承了YOLOv8的高效性, 能够在实时任务中快速准确地生成分割掩码。yolov8-seg官方有提供多种不同大小的模型:n、s、m、l、x, 这些开源模型的精度如下:
详情可参考yolov8-seg官方说明:
https://github.com/ultralytics/ultralytics/tree/v8.2.103
yolov8开源模型下载地址如下:
1.2 使用说明¶
Linux SDK-alkaid中默认带了已经预先转换好的离线模型及板端示例, 相关文件路径如下:
-
板端示例程序路径
Linux_SDK/sdk/verify/opendla/source/segmentation/yolov8 -
板端离线模型路径
Linux_SDK/project/board/${chip}/dla_file/ipu_open_models/pose/yolov8n_seg_640x640.img -
板端测试图像路径
Linux_SDK/sdk/verify/opendla/source/resource/bus.jpg
如果用户不需要转换模型可直接跳转至第3章节。
2 模型转换¶
2.1 onnx模型转换¶
-
python环境搭建
$conda create -n yolov8 python==3.10 $conda activate yolov8 $git clone https://github.com/ultralytics/ultralytics $cd ultralytics $pip install -e . -i https://pypi.tuna.tsinghua.edu.cn/simple注意:这里提供的python环境搭建, 仅作为参考示例, 具体搭建过程请参考官方源码运行教程:
https://docs.ultralytics.com/quickstart/ -
模型测试
-
编写模型测试脚本
predict.pyfrom ultralytics import YOLO # Load a pretrained YOLO8n-seg model model = YOLO("yolov8n-seg.pt") model.predict("bus.jpg", save=True, imgsz=640, conf=0.5) -
运行模型测试脚本, 确保yolov8环境配置正确。
$python predict.py
具体可参考yolov8官方测试文档
https://docs.ultralytics.com/zh/tasks/segment/#predict -
-
模型导出
-
编写模型转换脚本
export.py:import os import sys from ultralytics import YOLO model = YOLO("yolov8n-seg.pt") model.export(format="onnx", imgsz=[640,640], simplify=True, opset=13) -
运行模型转换脚本, 会在当目录下生成yolov8n-seg.onnx模型
$python export.py
-
2.2 离线模型转换¶
2.2.1 预&后处理说明¶
-
预处理
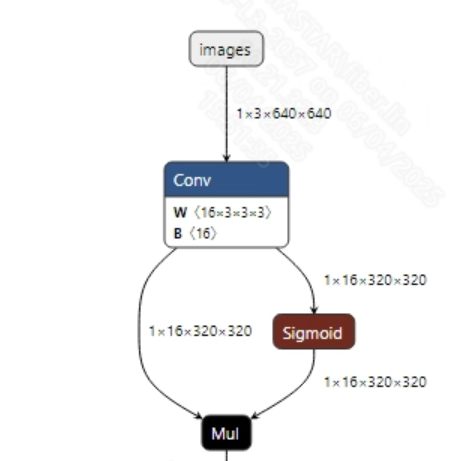
转换成功的yolov8n-seg.onnx模型输入信息如下图所示, 要求输入图像的尺寸为 (1, 3, 640, 640), 此外需要将像素值归一化到 [0, 1] 范围内。
-
后处理
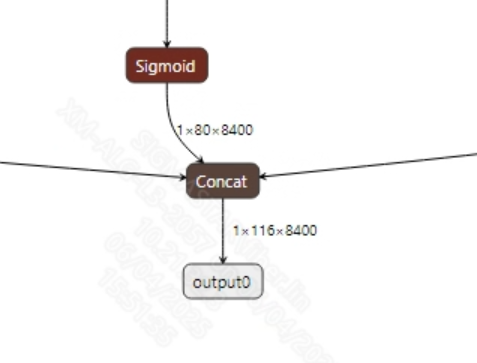
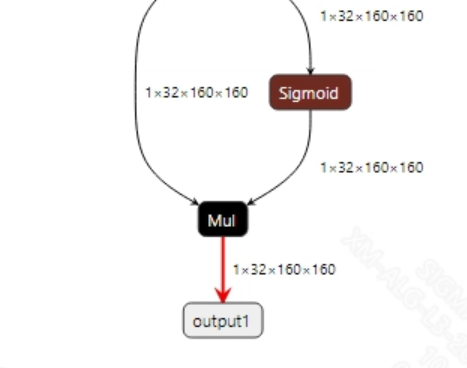
转换成功的yolov8n-pose.onnx模型输出信息如下图所示, 通常yolov8-seg转换出来的模型有两个输出, 输出维度分别为(1, 116, 8400)和(1, 32, 160, 160)。其中第一个输出中, 8400是候选框的数量, 116包括4个边界框坐标、80个类别概率和32个分割掩码的权重;第二个输出中, 32表示有32张分割掩码图, 160表示掩码图的大小。获取到模型输出的候选框后, 需要对所有候选框的类别进行判断以及NMS非极大值抑制操作后才能输出正确的坐标框, 然后需要再通过分割掩码处理(掩码裁剪、前景背景判断), 才能输出正确的结果。
2.2.2 offline模型转换流程¶
注意:1)OpenDLAModel对应的是压缩包image-dev_model_convert.tar解压之后的smodel文件。2)转换命令需要在docker环境下运行, 请先根据Docker开发环境教程, 加载SGS Docker环境。
-
拷贝onnx模型到转换代码目录
$cp ultralytics/yolov8n-seg.onnx OpenDLAModel/segment/yolov8/onnx -
转换命令
$cd IPU_SDK_Release/docker $bash run_docker.sh #进入到docker环境下的OpenDLAModel目录 $cd /work/SGS_XXX/OpenDLAModel $bash convert.sh -a segment/yolov8 -c config/segment_yolov8.cfg -p SGS_IPU_Toolchain(绝对路径) -s false -
最终生成的模型地址
output/${chip}_${时间}/yolov8n_seg_640x640.img output/${chip}_${时间}/yolov8n_seg_640x640_fixed.sim output/${chip}_${时间}/yolov8n_seg_640x640_float.sim
2.2.3 关键脚本参数解析¶
- input_config.ini
[INPUT_CONFIG]
inputs = images; #onnx 输入节点名称, 如果有多个需以“,”隔开;
training_input_formats = RGB; #模型训练时的输入格式, 通常都是RGB;
input_formats = BGRA; #板端输入格式, 可以根据情况选择BGRA或者YUV_NV12;
quantizations = TRUE; #打开输入量化, 不需要修改;
mean_red = 0; #均值, 跟模型预处理相关, 根据实际情况配置;
mean_green = 0; #均值, 跟模型预处理相关, 根据实际情况配置;
mean_blue = 0; #均值, 跟模型预处理相关, 根据实际情况配置;
std_value = 255; #方差, 跟模型预处理相关, 根据实际情况配置;
[OUTPUT_CONFIG]
outputs = output0,output0; #onnx 输出节点名称, 如果有多个需以“,”隔开;
dequantizations = FALSE,FALSE; #是否开启反量化, 根据实际需求填写, 建议为TRUE。设为False, 输出为int16; 设为True, 输出为float32
- pose_yolov8.cfg
[POSE]
CHIP_LIST=pcupid #平台名称, 必须和板端平台一致, 否则模型无法运行
Model_LIST=yolov8n_seg #输入onnx模型名称
INPUT_SIZE_LIST=640x640 #模型输入分辨率
INPUT_INI_LIST=input_config.ini #配置文件
CLASS_NUM_LIST=0 #填0即可
SAVE_NAME_LIST=yolov8n_seg_640x640.img #输出模型名称
QUANT_DATA_PATH=quant_data #量化图片路径
2.3 模型仿真¶
-
获取float/fixed/offline模型输出
$bash convert.sh -a segment/yolov8 -c config/segment_yolov8.cfg -p SGS_IPU_Toolchain(绝对路径) -s true执行上述命令后, 会默认将
float模型的输出tensor保存到segment/yolov8/log/output路径下的txt文件中。此外, 在segment/yolov8/convert.sh脚本中也提供了fixed和offline的仿真示例, 用户在运行时可以通过打开注释代码块, 分别获取fixed和offline模型输出。 -
模型精度对比
在保证输入和上述模型相同的情况下, 进入2.1章节搭建好的环境, 在
ultralytics/ultralytics/nn/modules/head.py文件的第115行处添加打印:print((torch.cat([x, mc], 1), p))获取pytorch模型对应节点的输出tensor, 进而和float、fixed、offline模型进行对比。此外需要特别注意的是, 原始模型的输出格式是
NCHW, 而float/fixed/offline模型输出的格式是NHWC。
3 板端部署¶
3.1 程序编译¶
示例程序编译之前需要先根据板子(nand/nor/emmc, ddr型号等)选择deconfig进行sdk整包编译, 具体可以参考alkaid sdk sigdoc《开发环境搭建》文档。
-
编译板端yolov8_seg示例。
$cd sdk/verify/opendla $make clean && make source/segmentation/yolov8 -j8 -
最终生成的可执行文件地址
sdk/verify/opendla/out/${AARCH}/app/prog_segmentation_yolov8
3.2 运行文件¶
运行程序时, 需要先将以下几个文件拷贝到板端
- prog_segmentation_yolov8
- bus.jpg
- yolov8n_seg_640x640.img
3.3 运行说明¶
-
Usage:
./prog_segmentation_yolov8 -i image -m model [-t threshold](执行文件使用命令) -
Required Input:
- image: 图像文件夹/单张图像路径
- model: 需要测试的offline模型路径
-
Optional Input:
- threshold: 检测阈值(0.0~1.0, 默认为0.5)
-
Typical output:
./prog_segmentation_yolov8 -i ./resource/bus.jpg -m models/yolov8n_seg_640x640.img inputs: ./resource/bus.jpg model path: models/yolov8n_seg_640x640.img threshold: 0.500000 client [652] connected, module:ipu found 1 images! [0] processing ./resource/bus.jpg... fillbuffer processing... net input width: 640, net input height: 640 model invoke time: 50.412000 ms post process time: 44.594000 ms outImagePath: ./output/673608/images/bus.png ------shutdown IPU0------ client [652] disconnected, module:ipu